affineplane
Affineplane API Documentation v2.21.0
Welcome to affineplane API reference documentation. These docs are generated with yamdog.
See also Usage and GitHub for introduction and source code.
affineplane
The affineplane module provides functions for affine 2D and 3D geometry. The functions are grouped in the following submodules.
Contents:
- affineplane.angle
- affineplane.box2
- affineplane.box3
- affineplane.circle2
- affineplane.circle3
- affineplane.dir2
- affineplane.dir3
- affineplane.dist2
- affineplane.dist3
- affineplane.epsilon
- affineplane.helm2
- affineplane.helm3
- affineplane.line2
- affineplane.line3
- affineplane.orient2
- affineplane.path2
- affineplane.path3
- affineplane.plane2
- affineplane.plane3
- affineplane.point2
- affineplane.point3
- affineplane.poly2
- affineplane.quat4
- affineplane.ray3
- affineplane.rect2
- affineplane.rect3
- affineplane.rot2
- affineplane.scalar1
- affineplane.scalar2
- affineplane.scalar3
- affineplane.segment2
- affineplane.segment3
- affineplane.size2
- affineplane.size3
- affineplane.sphere2
- affineplane.sphere3
- affineplane.vec2
- affineplane.vec3
- affineplane.vec4
- affineplane.version
Source: lib/index.js
affineplane.angle
Common utilites to handle angles.
Contents:
Source: angle/index.js
affineplane.angle.degToRad(deg)
Convert angle from degrees to radians, for example 720 becomes 4π.
Parameters:
- deg
- a number, an angle in degrees.
Returns:
- a number, the angle in radians.
Source: degToRad.js
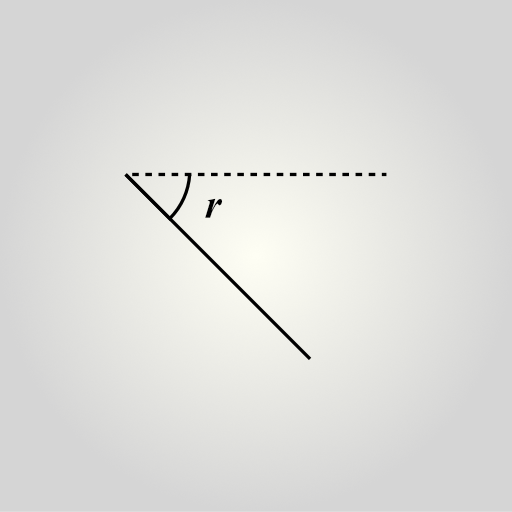
affineplane.angle.modulo(r)
Limit an angle between ]-PI, +PI] but preserve the direction. This can be used to preprocess user input, for example to normalize 4*PI as 0.
Parameters:
- r
- angle in radians, allowed to be outside ]-PI, +PI].
Returns:
- a number, the angle in radians and between ]-PI, +PI]
Source: modulo.js
affineplane.angle.radToDeg(rad)
Convert angle from radians to degrees. For example 4π becomes 720.
Parameters:
- rad
- a number, an angle in radians.
Returns:
- a number, the angle in degrees.
Source: radToDeg.js
affineplane.box2
Two-dimensional rectangle. Unlike size2, box2 has location and orientation and thus can be represented in any basis without loss of information.
Represented with an object { a, b, x, y, w, h } where
a,bprovide orientation with respect to the reference basis. The norm of vector (a,b) is always 1.x,yprovide origin position in the reference basis.w,hprovide box size on the reference basis.
Contents:
- affineplane.box2.UNIT
- affineplane.box2.ZERO
- affineplane.box2.almostEqual
- affineplane.box2.at
- affineplane.box2.atBox
- affineplane.box2.atNorm
- affineplane.box2.collide
- affineplane.box2.create
- affineplane.box2.equal
- affineplane.box2.fromPoints
- affineplane.box2.getAngle
- affineplane.box2.getArea
- affineplane.box2.getBasis
- affineplane.box2.getBasisInverse
- affineplane.box2.getBounds
- affineplane.box2.getCircle
- affineplane.box2.getInnerSquare
- affineplane.box2.getMinimumBounds
- affineplane.box2.getPath
- affineplane.box2.getPoints
- affineplane.box2.getPolygon
- affineplane.box2.getSegments
- affineplane.box2.getSize
- affineplane.box2.getSphere
- affineplane.box2.hasPoint
- affineplane.box2.homothety
- affineplane.box2.offset
- affineplane.box2.projectTo
- affineplane.box2.projectToPlane
- affineplane.box2.resizeBy
- affineplane.box2.resizeTo
- affineplane.box2.rotateBy
- affineplane.box2.scaleBy
- affineplane.box2.transitFrom
- affineplane.box2.transitTo
- affineplane.box2.translate
- affineplane.box2.validate
Source: box2/index.js
affineplane.box2.UNIT
An origin-centered box with unit width and height.
Source: box2/index.js
affineplane.box2.ZERO
A zero-size box.
Source: box2/index.js
affineplane.box2.almostEqual(b, bb[, tolerance])
Are two boxes almost equal?
Parameters:
- b
- a box2
- bb
- a box2
- tolerance
- optional number, default is affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.box2.at(box, rx, ry)
Take a point on the box, represented in the reference basis.
Parameters:
- box
- a box2
- rx
- horizontal distance from the top-left corner of the box represented on the box’s inner basis. The unit of distance is same in the reference basis.
- ry
- vertical distance from the top-left corner of the box represented on the box’s inner basis. The unit of distance is same in the reference basis.
Returns:
- a point2 in the reference basis.
Source: at.js
affineplane.box2.atBox(box, x, y)
Take a point in the reference basis and represent it in the box basis. This is like affineplane.box2.at but to the other direction.
Parameters:
- box
- a box2
- x
- horizontal coordinate in the reference basis.
- y
- vertical coordinate in the reference basis.
Returns:
- a point2 in the box basis.
Source: atBox.js
affineplane.box2.atNorm(box, nw, nh)
Take a point on the box at the normalized coordinates.
Parameters:
- box
- a box2
- nw
- a number, a normalized coordinate along width 0..1
- nh
- a number, a normalized coordinate along height 0..1
Returns:
- a point2 in the reference basis.
Source: atNorm.js
affineplane.box2.collide(b, bb)
Do two boxes collide?
Parameters:
Returns:
- a boolean, true if boxes collide.
Source: collide.js
affineplane.box2.create(plane, size)
Create a box2 object.
Parameters:
- plane
- a plane2 on the reference basis. Defines the box origin and orientation. Scale is defaulted to 1.
- size
- a size2 on the reference basis. Defines the box size.
Returns:
- a box2
Source: create.js
affineplane.box2.equal(b, bb)
Test if two boxes are strictly equal in orientation, position, and size. Boxes are allowed to have additional non-equal properties.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.box2.fromPoints(points)
Get a rectangular boundary of the given points. In other words, compute such a box that has no rotation and no dilation with respect to the reference basis but has translation and size so that it covers the given points.
Parameters:
- points
- array of point2, each in the reference basis.
Returns:
- a box2, in the reference basis.
Source: fromPoints.js
affineplane.box2.getAngle(box)
Compute box angle in radians with respect to the reference basis.
Parameters:
- box
- a box2, in the reference basis.
Returns:
- a number, the angle in radians.
Source: getAngle.js
affineplane.box2.getArea(box)
Compute box area. This returns the area in the reference basis.
Parameters:
- box
- a box2, in the reference basis.
Returns:
- a number, the area in the reference basis.
Source: getArea.js
affineplane.box2.getBasis(box)
Get the inner basis of the box. In other words, represent the box inner basis as a plane in the reference basis. The scale of the resulting basis is always 1. See also affineplane.box2.getBasisInverse.
Parameters:
- box
- a box2 in the reference basis.
Returns:
- a plane2 in the reference basis.
Source: getBasis.js
affineplane.box2.getBasisInverse(box)
Get the outer basis of the box represented in the box basis. The scale of the resulting basis is always 1. See also affineplane.box2.getBasis.
Parameters:
- box
- a box2 in the reference basis.
Returns:
- a plane2 in the box basis. The outer basis.
Source: getBasisInverse.js
affineplane.box2.getBounds(boxes)
Get outer rectangular boundary of the given box or boxes. In other words, compute such a box that has no rotation and no dilation with respect to the reference basis but has translation and size so that it covers the given box or boxes.
Parameters:
Returns:
- a box2, in the reference basis.
Source: getBounds.js
affineplane.box2.getCircle(box)
Get the circumscribed circle of the box. In other words, get the circle that contains the box so that the box corners are on it. The resulting circle is also the minimum bounding circle of the box.
Parameters:
- box
- a box2, in the reference basis.
Returns:
- a sphere2
Aliases: affineplane.box2.getSphere
Source: getCircle.js
affineplane.box2.getInnerSquare(box)
Get the largest square that fits inside the box and has the same center.
Parameters:
- box
- a box2, in the reference basis.
Returns:
- a box2, in the reference basis.
Source: getInnerSquare.js
affineplane.box2.getMinimumBounds(boxes)
Find approximate minimum bounding box aka minimum area rectangle (MAR). Such MAR contains all the given set of boxes. The orientation of the resulting bounding box is not necessarily parallel with the reference basis.
Parameters:
- boxes
- array of box2
Returns:
- a box2
Source: getMinimumBounds.js
affineplane.box2.getPath(box)
Get the box corner points as a path. Points are in clock-wise order.
Parameters:
- box
Returns:
- a path2
Aliases: affineplane.box2.getPoints, affineplane.box2.getPolygon
Source: getPath.js
affineplane.box2.getPoints
Alias of affineplane.box2.getPath
affineplane.box2.getPolygon
Alias of affineplane.box2.getPath
affineplane.box2.getSegments(box)
Get the four line segments of the box.
Parameters:
- box
- a box2, in the reference basis.
Returns:
- array of segment2, each segment in the reference basis.
Source: getSegments.js
affineplane.box2.getSize(box)
Get the size of the box.
Parameters:
- box
- a box2 in the reference basis.
Returns:
- a size2 in the reference basis.
Source: getSize.js
affineplane.box2.getSphere
Alias of affineplane.box2.getCircle
affineplane.box2.hasPoint(box, point)
Test if a point is inside the box. If the point is at the box edge, it is counted as being inside.
Parameters:
Returns:
- a boolean
Source: hasPoint.js
affineplane.box2.homothety(box, origin, ratio)
Perform homothety about the origin. In other words, scale the box about the fixed pivot point.
Parameters:
- box
- a box2, the box to be scaled.
- origin
- a point2, the fixed origin point.
- ratio
- a number, the scaling ratio.
Returns:
- a box2
Aliases: affineplane.box2.scaleBy
Source: homothety.js
affineplane.box2.offset(box, dx, dy)
Move the box horizontally and vertically.
Parameters:
- box
- a box2
- dx
- a number
- dy
- a number
Returns:
- a box2
Source: offset.js
affineplane.box2.projectTo
Alias of affineplane.box2.projectToPlane
affineplane.box2.projectToPlane(box, target[, camera])
Project a box onto a target plane in 3d. If a camera is given, project perspectively. Otherwise, project orthogonally.
Parameters:
- box
- a box2 in the reference basis, assume z=0.
- target
- a plane3 in the reference basis.
- camera
- optional point3 in the reference basis.
Returns:
- a box2 on the target plane.
Aliases: affineplane.box2.projectTo
Source: projectToPlane.js
affineplane.box2.resizeBy(box, origin, dw, dh)
Resize the box with respect to a fixed origin by the specified amounts. For example, this allows resizing the box by its center point. The operation does not change the box orientation.
Parameters:
- box
- a box2, in the reference basis
- origin
- a point2, in the reference basis. The origin is allowed to be outside the box but will be capped to the nearest point within the box.
- dw
- a number, the width increase. Can be negative.
- dh
- a number, the height increase. Can be negative.
Returns:
- a box2
Source: resizeBy.js
affineplane.box2.resizeTo(box, origin, width, height)
Resize the box to the given width and height. The origin point stays fixed relative to the box size. For example, this allows resizing the box by its center point. The operation does not change the box orientation.
Parameters:
- box
- a box2, in the reference basis
- origin
- a point2, in the reference basis. The origin is allowed to be outside the box but will be capped to the nearest point within the box.
- width
- a positive number, the new width.
- height
- a positive number, the new height.
Returns:
- a box2
Source: resizeTo.js
affineplane.box2.rotateBy(box, origin, radians)
Rotate the box around an origin point by an angle in radians. Rotation direction is from positive x axis towards positive y axis.
Parameters:
- box
- a box2, in the reference basis
- origin
- a point2 in the reference basis.
- radians
- a number, rotation angle in radians.
Returns:
- a box2
Source: rotateBy.js
affineplane.box2.scaleBy(box, origin, ratio)
Alias of affineplane.box2.homothety
affineplane.box2.transitFrom(box, source)
Convert a box from source basis to the reference basis.
Parameters:
- box
- a box2, a box in the source basis.
- source
- a plane2, the source basis represented in the reference basis.
Returns:
- a box2, represented in the reference basis.
Source: transitFrom.js
affineplane.box2.transitTo(box, target)
Convert a box from the reference basis to the target basis.
Parameters:
- box
- a box2, a rectangle in the reference basis.
- target
- a plane2, the target basis represented in the reference basis.
Returns:
- a box2, represented in the target basis.
Source: transitTo.js
affineplane.box2.translate(box, vec)
Move the box horizontally and vertically by a vector. See affineplane.box2.offset to move by scalars.
Parameters:
Returns:
- a box2
Source: translate.js
affineplane.box2.validate(b)
Check if the object is a valid box2. Valid box2 has properties a and b that represent valid rotation matrix, properties x and y that are valid numbers, and properties w and h that represent size.
Parameters:
- b
- an object
Returns:
- a boolean, true if valid box2
Source: validate.js
affineplane.box3
Three-dimensional cuboid that has the front face parallel with xy-plane. Unlike size3, box3 has location and orientation and thus can be represented in any basis without loss of information.
Represented with an object { a, b, x, y, z, w, h, d } where
a,bprovide orientation on xy-plane with respect to the reference basis.x,y,zprovide origin position in the reference basis.w,h,dprovide box size on the reference basis.
Contents:
- affineplane.box3.UNIT
- affineplane.box3.ZERO
- affineplane.box3.almostEqual
- affineplane.box3.at
- affineplane.box3.atBox
- affineplane.box3.atNorm
- affineplane.box3.collide
- affineplane.box3.create
- affineplane.box3.equal
- affineplane.box3.fromPoints
- affineplane.box3.getAngle
- affineplane.box3.getBasis
- affineplane.box3.getBasisInverse
- affineplane.box3.getBounds
- affineplane.box3.getMinimumBounds
- affineplane.box3.getSize
- affineplane.box3.getSphere
- affineplane.box3.getVolume
- affineplane.box3.hasPoint
- affineplane.box3.homothety
- affineplane.box3.projectTo
- affineplane.box3.projectToPlane
- affineplane.box3.resizeBy
- affineplane.box3.resizeTo
- affineplane.box3.rotateBy
- affineplane.box3.scaleBy
- affineplane.box3.transitFrom
- affineplane.box3.transitTo
- affineplane.box3.translate
- affineplane.box3.translateBy
- affineplane.box3.validate
Source: box3/index.js
affineplane.box3.UNIT
An origin-centered box with unit width, height, and depth.
Source: box3/index.js
affineplane.box3.ZERO
A zero-size box.
Source: box3/index.js
affineplane.box3.almostEqual(b, bb[, tolerance])
Are two boxes almost equal?
Parameters:
- b
- a box3
- bb
- a box3
- tolerance
- optional number, default is affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.box3.at(box, rx, ry, rz)
Take a point on the box, represented in the reference basis.
Parameters:
- box
- a box3
- rx
- horizontal distance from the left side of the box represented on the box’s inner basis. The unit of distance is same in the reference basis because the box has fixed scale of 1.
- ry
- vertical distance from the top side of the box represented on the box’s inner basis. The unit of distance is same in the reference basis.
- rz
- distal distance from the front side of the box represented on the box’s inner basis. The unit of distance is same in the reference basis.
Returns:
- a point3 in the reference basis.
Source: at.js
affineplane.box3.atBox(box, x, y, z)
Take a point in the reference basis and represent it in the box basis. This is like affineplane.box3.at but to the other direction.
Parameters:
- box
- a box3
- x
- horizontal coordinate in the reference basis.
- y
- vertical coordinate in the reference basis.
- z
- depth coordinate in the reference basis.
Returns:
- a point3 in the box basis.
Source: atBox.js
affineplane.box3.atNorm(box, nw, nh, nd)
Take a point on the box with coordinates normalized to box sizes.
Parameters:
- box
- a box3
- nw
- a number, a normalized coordinate 0..1 along width
- nh
- a number, a normalized coordinate 0..1 along height
- nd
- a number, a normalized coordinate 0..1 along depth
Returns:
- a point3 in the reference basis.
Source: atNorm.js
affineplane.box3.collide(b, bb)
Test if the two boxes collide. The boxes collide when the intersection of their solid cuboids is not empty.
Parameters:
Returns:
- a boolean, true if boxes collide.
Source: collide.js
affineplane.box3.create(basis, size)
Create a box3 object.
Parameters:
- basis
- a plane3 on the reference basis. Defines the box origin and orientation.
- size
- a size3 on the reference basis. Defines the box size.
Returns:
- a box3
Source: create.js
affineplane.box3.equal(b, bb)
Test if two boxes are strictly equal in orientation, position, and size. Boxes are allowed to have additional non-equal properties.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.box3.fromPoints(points)
Get a cuboid boundary of the given points. In other words, compute such a 3D box that has no rotation and no dilation with respect to the reference basis but has translation and size so that it encloses the given points.
Parameters:
- points
- array of point3, each in the reference basis.
Returns:
- a box3, in the reference basis.
Source: fromPoints.js
affineplane.box3.getAngle(box)
Compute box angle in radians with respect to the reference basis.
Parameters:
- box
- a box2, in the reference basis.
Returns:
- a number, the angle in radians.
Source: getAngle.js
affineplane.box3.getBasis(box)
Get the inner basis of the box. The scale of the resulting basis is always 1.
Parameters:
- box
- a box3 in the reference basis.
Returns:
- a plane3 in the reference basis.
Source: getBasis.js
affineplane.box3.getBasisInverse(box)
Get the outer basis of the box represented in the box basis. The scale of the resulting basis is always 1. See also affineplane.box3.getBasis.
Parameters:
- box
- a box3 in the reference basis.
Returns:
- a plane3 in the box basis. The outer basis.
Source: getBasisInverse.js
affineplane.box3.getBounds(boxes)
Get outer cuboid boundary of the given box or boxes. In other words, compute such a box that has no rotation and no dilation with respect to the reference basis but has translation and size so that it covers all the given boxes.
Parameters:
Returns:
- a box3, in the reference basis.
Source: getBounds.js
affineplane.box3.getMinimumBounds(boxes)
Find approximate minimum bounding box. Such a box contains all the given set of boxes. The orientation of the resulting bounding box (on xy-plane) is selected so that the box volume is minimal. Thus the orientation is not necessarily parallel with the reference basis.
Parameters:
- boxes
- array of box3
Returns:
- a box3
Source: getMinimumBounds.js
affineplane.box3.getSize(box)
Get the size of the box.
Parameters:
- box
- a box3 in the reference basis.
Returns:
- a size3 in the reference basis.
Source: getSize.js
affineplane.box3.getSphere(box)
Get the circumscribed sphere of the box. In other words, get the sphere that contains the box so that the box corners are on the sphere. The resulting sphere is also the minimum bounding sphere of the box.
Parameters:
- box
- a box3, in the reference basis.
Returns:
- a sphere3
Source: getSphere.js
affineplane.box3.getVolume(box)
Compute box volume. This returns the volume as a measure in the reference basis.
Parameters:
- box
- a box3, a cuboid in the reference basis.
Returns:
- a number, the volume in the reference basis.
Source: getVolume.js
affineplane.box3.hasPoint(box, point)
Test if a point is inside the box. If the point is at the box edge, it is counted as being inside.
Parameters:
Returns:
- a boolean
Source: hasPoint.js
affineplane.box3.homothety(box, origin, ratio)
Perform homothety about an origin point. In other words, scale the box about the fixed pivot point.
Parameters:
- box
- a box3, the box to be scaled.
- origin
- a point3, the fixed pivot point.
- ratio
- a number, the scaling ratio.
Returns:
- a box3
Aliases: affineplane.box3.scaleBy
Source: homothety.js
affineplane.box3.projectTo
Alias of affineplane.box3.projectToPlane
affineplane.box3.projectToPlane(box, target[, camera])
Project a 3D box onto a target plane. If a camera is given, project perspectively. Otherwise, project orthogonally along z axis. The resulting box is in 2D.
We only project the front face of the 3D box. This is because if we projected a full 3D box perspectively, we would get a lattice mesh in which we are not currently interested. To scale the box towards camera, see affineplane.box3.homothety.
Parameters:
- box
- a box3 in the reference basis.
- target
- a plane3 in the reference basis.
- camera
- optional point3 in the reference space. The camera position.
Returns:
- a box2 on the target plane.
Aliases: affineplane.box3.projectTo
Source: projectToPlane.js
affineplane.box3.resizeBy(box, origin, dw, dh, dd)
Resize the box with respect to a fixed origin by the specified amounts. For example, this allows resizing the box by its center point. The operation does not change the box orientation.
Parameters:
- box
- a box3, in the reference basis
- origin
- a point3, in the reference basis. The origin is allowed to be outside the box but will be capped to the nearest point within the box.
- dw
- a number, the width increase. Can be negative.
- dh
- a number, the height increase. Can be negative.
- dd
- a number, the depth increase. Can be negative.
Returns:
- a box3
Source: resizeBy.js
affineplane.box3.resizeTo(box, origin, width, height, depth)
Resize the box to the given width, height, and depth. The origin point stays fixed relative to the box size. For example, this allows resizing the box by its center point. The operation does not change the box orientation.
Parameters:
- box
- a box3, in the reference basis
- origin
- a point3, in the reference basis. The origin is allowed to be outside the box but will be capped to the nearest point within the box.
- width
- a positive number, the new width.
- height
- a positive number, the new height.
- depth
- a positive number, the new depth.
Returns:
- a box3
Source: resizeTo.js
affineplane.box3.rotateBy(box, origin, radians)
Rotate the box around an origin point by an angle in radians. Rotation direction is from positive x axis towards positive y axis.
Parameters:
- box
- a box3, in the reference basis
- origin
- a point3 in the reference basis.
- radians
- a number, rotation angle in radians.
Returns:
- a box3
Source: rotateBy.js
affineplane.box3.scaleBy(box, origin, ratio)
Alias of affineplane.box3.homothety
affineplane.box3.transitFrom(box, source)
Convert a box from source basis to the reference basis.
Parameters:
- box
- a box3, a cuboid in the source basis.
- source
- a plane3, the source basis represented in the reference basis.
Returns:
- a box3, represented in the reference basis.
Source: transitFrom.js
affineplane.box3.transitTo(box, target)
Convert a box from the reference basis to the target basis.
Parameters:
- box
- a box3, a cuboid in the reference basis.
- target
- a plane3, the target basis represented in the reference basis.
Returns:
- a box3, represented in the target basis.
Source: transitTo.js
affineplane.box3.translate(box, vec)
Move the box by the given vector. See affineplane.box3.offset to translate by scalars.
Parameters:
Returns:
- a box3
Source: translate.js
affineplane.box3.translateBy(box, dx, dy, dz)
Move the box along x, y, and/or z axis by the given amounts.
Parameters:
- box
- a box3
- dx
- a number
- dy
- a number
- dz
- a number
Returns:
- a box3
Source: offset.js
affineplane.box3.validate(b)
Check if the object is a valid box3. Valid box3 has properties a and b that represent valid rotation matrix, properties x, y, z that are valid numbers, and properties w, h, d that represent size.
Parameters:
- b
- an object
Returns:
- a boolean, true if valid box2
Source: validate.js
affineplane.circle2
Alias of affineplane.sphere2
affineplane.circle3
Flat round circle in three dimensional space. Parallel to the xy-plane.
Represented with an object { x, y, z, r } for the origin and the radius.
Contents:
- affineplane.circle3.UNIT
- affineplane.circle3.ZERO
- affineplane.circle3.almostEqual
- affineplane.circle3.area
- affineplane.circle3.atCenter
- affineplane.circle3.boundingBox
- affineplane.circle3.boundingCircle
- affineplane.circle3.collide
- affineplane.circle3.collideCircle
- affineplane.circle3.collideSegment
- affineplane.circle3.copy
- affineplane.circle3.create
- affineplane.circle3.equal
- affineplane.circle3.hasPoint
- affineplane.circle3.homothety
- affineplane.circle3.offset
- affineplane.circle3.polarOffset
- affineplane.circle3.projectTo
- affineplane.circle3.projectToPlane
- affineplane.circle3.rotateBy
- affineplane.circle3.scaleBy
- affineplane.circle3.size
- affineplane.circle3.transitFrom
- affineplane.circle3.transitTo
- affineplane.circle3.translate
- affineplane.circle3.validate
Source: circle3/index.js
affineplane.circle3.UNIT
The unit circle, radius=1.
Source: circle3/index.js
affineplane.circle3.ZERO
A zero-radius circle.
Source: circle3/index.js
affineplane.circle3.almostEqual(c, d[, tolerance])
Test if two circles are almost equal by the margin of tolerance.
Parameters:
- c
- a circle3
- d
- a circle3
- tolerance
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.circle3.area(c)
Get area of the circle.
Parameters:
- a circle3
Returns:
- a scalar2, a number representing area
Source: area.js
affineplane.circle3.atCenter(c)
Get the center point of the circle. Note that the circle3 object itself can act as a point3 in many cases.
Parameters:
- c
- a circle3
Returns:
- a point3
Source: atCenter.js
affineplane.circle3.boundingBox(circle)
Get outer cuboid boundary of the given circle.
Parameters:
- circle
- a circle3, in the reference basis.
Returns:
- a box3, in the reference basis.
Source: boundingBox.js
affineplane.circle3.boundingCircle(circles)
Find a circle that encloses all the given circles when projected onto the same xy-plane. The resulting circle shares the largest z coordinate of the given circles. The result is approximate but is quaranteed to contain the optimal (projected) bounding circle.
Parameters:
- circles
- an array of circle3
Returns:
- a circle3
Source: boundingCircle.js
affineplane.circle3.collide(c, cc)
Detect collision between two circles.
Parameters:
Returns:
- boolean, true if the circles collide
Aliases: affineplane.circle3.collideCircle
Source: collide.js
affineplane.circle3.collideCircle(c, cc)
Alias of affineplane.circle3.collide
affineplane.circle3.collideSegment(c, seg)
Detect collision between a circle and a line segment.
Parameters:
Returns:
- boolean, true if the shapes collide
Source: collideSegment.js
affineplane.circle3.copy(c)
Copy a circle object.
Parameters:
- c
- a circle3
Returns:
- a circle3
Source: copy.js
affineplane.circle3.create(x, y, z, r)
Create a circle object in 3D. The circle is a flat round shape parallel to xy-plane.
Parameters:
- x
- a number
- y
- a number
- z
- a number
- r
- a number, the radius
Returns:
- a circle3
Source: create.js
affineplane.circle3.equal(c, d)
Test if two spheres are strictly equal in radius and position. See affineplane.circle3.almostEqual for loose comparison.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.circle3.hasPoint(c, point)
Detect collision between a circle and a point.
Parameters:
Returns:
- boolean, true if the point is at the edge or inside the circle.
Source: hasPoint.js
affineplane.circle3.homothety(circle, origin, ratio)
Perform homothety for the circle about a pivot. In other words, scale the circle by the given ratio, so that the origin point stays fixed.
Parameters:
- circle
- a circle3
- origin
- a point3, the transform origin, the pivot point
- ratio
- a number, the scaling ratio
Returns:
- a circle3
Aliases: affineplane.circle3.scaleBy
Source: homothety.js
affineplane.circle3.offset(c, dx, dy[, dz])
Offset a circle by scalars dx, dy, dz. See affineplane.circle3.translate to offset by a vector.
Parameters:
- c
- a circle3
- dx
- a number, an offset along x-axis.
- dy
- a number, an offset along y-axis.
- dz
- optional number. The offset along z-axis, default is 0.
Returns:
- a circle3, translated
Source: offset.js
affineplane.circle3.polarOffset(circle, distance, theta[, phi])
Offset a circle by the given distance towards the direction given by the spherical theta and phi angles.
Parameters:
- circle
- a circle3
- distance
- a number, the distance from p.
- theta
- a number, the angle around z-axis, the azimuthal angle. Clockwise rotation, following the right-hand rule.
- phi
- optional number, default π/2. The polar angle in radians measured from the positive z-axis.
Returns:
- a circle3
Source: polarOffset.js
affineplane.circle3.projectTo
Alias of affineplane.circle3.projectToPlane
affineplane.circle3.projectToPlane(circle, plane[, camera])
Project a circle onto a plane in 3D space. The result is a 2D circle. If the camera is undefined, project orthogonally.
Parameters:
- sphere
- a circle3 in the reference space.
- plane
- a plane3 in the reference space. The target plane.
- camera
- optional point3 in the reference space. The camera position.
Returns:
- a circle2 on the target plane.
Aliases: affineplane.circle3.projectTo
Source: projectToPlane.js
affineplane.circle3.rotateBy(c, origin, radians)
Rotate a circle about a line parallel to z-axis that goes through the given origin point. The rotation direction follows the right hand rule about the positive z-axis.
Parameters:
- c
- a circle3
- origin
- a point3, the point that defines the line around which to rotate
- radians
- a number, angle in radians
Returns:
- a circle3, the rotated circle
Source: rotateBy.js
affineplane.circle3.scaleBy
Alias of affineplane.circle3.homothety
affineplane.circle3.size(c)
Get the cuboid size of a circle. Circles always have zero depth.
Parameters:
- c
- a circle3 in the reference basis.
Returns:
- a size3 in the reference basis.
Source: size.js
affineplane.circle3.transitFrom(circle, source)
Transit a circle3 from the source basis to the reference basis.
Parameters:
- circle
- a circle3 in the source basis.
- source
- a plane3, the source basis, represented in the reference basis.
Returns:
- a circle3, represented in the reference basis.
Source: transitFrom.js
affineplane.circle3.transitTo(circle, target)
Transit a circle3 to the target basis from the reference basis.
Parameters:
- circle
- a circle3 in the source basis.
- source
- a plane3, the source basis, represented in the reference basis.
Returns:
- a circle3, represented in the reference basis.
Source: transitTo.js
affineplane.circle3.translate(c, vec)
Translate a circle by the vector. Does not affect radius. See affineplane.circle3.offset to translate by scalars.
Parameters:
Returns:
- a circle3, translated
Source: translate.js
affineplane.circle3.validate(c)
Check if the object is a valid circle3. A valid circle3 has x, y, z, r properties that are valid numbers.
Parameters:
- c
- an object
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.dir2
A direction on 2D space, represented by the object { x, y }.
A direction is basically a unit vector. When a direction is transited between planes, only the rotation of the coordinate space affects the direction. Scale change does not affect it.
Contents:
- affineplane.dir2.almostEqual
- affineplane.dir2.copy
- affineplane.dir2.create
- affineplane.dir2.equal
- affineplane.dir2.fromPolar
- affineplane.dir2.fromVector
- affineplane.dir2.projectTo
- affineplane.dir2.projectToPlane
- affineplane.dir2.toAngle
- affineplane.dir2.toPolar
- affineplane.dir2.toVector
- affineplane.dir2.transitFrom
- affineplane.dir2.transitTo
- affineplane.dir2.validate
Source: dir2/index.js
affineplane.dir2.almostEqual(d, dd[, epsilon])
Test if directions are almost equal by the margin of epsilon. The directions are compared as two unit vectors.
Parameters:
- d
- a dir2
- dd
- a dir2
- epsilon
- Optional number, default to affineplane.epsilon.
- Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.dir2.copy(dir)
Copy direction object.
Parameters:
- dir
- a dir2
Returns:
- a dir2
Source: copy.js
affineplane.dir2.create
Alias of affineplane.dir2.fromPolar
affineplane.dir2.equal(d, dd)
Test if directions are strictly equal in value. The directions are compared as two vectors.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.dir2.fromPolar(r)
Create a new direction from an angle.
Parameters:
- r
- a number. The angle in radians.
Returns:
- a dir2
Aliases: affineplane.dir2.create
Source: fromPolar.js
affineplane.dir2.fromVector(v)
Create a new direction from a vector. Basically, extract an unit vector from the given vector. If given a zero vector, return a direction towards positive x-axis.
Parameters:
- v
- a vec2
Returns:
- a dir2
Source: fromVector.js
affineplane.dir2.projectTo
Alias of affineplane.dir2.projectToPlane
affineplane.dir2.projectToPlane(dir, plane)
Project a 2D direction onto a 2D plane. Perspective does not affect the direction.
Parameters:
Returns:
- a dir2 on the image plane.
Aliases: affineplane.dir2.projectTo
Source: projectToPlane.js
affineplane.dir2.toAngle
Alias of affineplane.dir2.toPolar
affineplane.dir2.toPolar(dir)
Get the direction as angle around z-axis measured from positive x-axis.
Parameters:
Returns:
- a number, an angle in radians in ]-π, π].
Aliases: affineplane.dir2.toAngle
Source: toPolar.js
affineplane.dir2.toVector(dir, magn)
Get a vector from the direction with the given length.
Parameters:
- dir
- a dir2
- magn
- a number, the magnitude of the vector to create.
Returns:
- a vec2
Source: toVector.js
affineplane.dir2.transitFrom(dir, source)
Transit a direction from the source plane to the reference plane.
Parameters:
- dir
- a dir2 on the source plane.
- source
- a plane2, the source plane, represented on the reference plane.
Returns:
- a dir2, represented on the reference plane.
Source: transitFrom.js
affineplane.dir2.transitTo(dir, target)
Transit a dir2 to a target plane. In other words, represent the direction in the coordinate system of the target plane.
Parameters:
- dir
- a number, a dir2 on the reference plane.
- target
- a plane2, the target plane, represented on the reference plane.
Returns:
- a dir2 on the target plane.
Source: transitTo.js
affineplane.dir2.validate(d)
Check if object is a valid dir2. Valid dir2 is an object with properties x,y that represent a unit vector.
Parameters:
- d
- an object
Returns:
- a boolean
Source: validate.js
affineplane.dir3
A direction in 3D, represented by the object { x, y, z }.
The direction is basically a unit vector that carries semantics of direction. Under a change of the reference frame, the change in translation and scale do not affect the direction, only the change in orientation (=attitude) does.
Contents:
- affineplane.dir3.almostEqual
- affineplane.dir3.copy
- affineplane.dir3.create
- affineplane.dir3.equal
- affineplane.dir3.fromSpherical
- affineplane.dir3.fromVector
- affineplane.dir3.projectTo
- affineplane.dir3.projectToPlane
- affineplane.dir3.toSpherical
- affineplane.dir3.toVector
- affineplane.dir3.transitFrom
- affineplane.dir3.transitTo
- affineplane.dir3.validate
Source: dir3/index.js
affineplane.dir3.almostEqual(d, dd[, epsilon])
Test if directions are almost equal by the margin of epsilon. The directions are compared as two unit vectors.
Parameters:
- d
- a dir3
- dd
- a dir3
- epsilon
- Optional number, default to affineplane.epsilon.
- Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.dir3.copy(dir)
Copy direction object.
Parameters:
- dir
- a dir3
Returns:
- a dir3
Source: copy.js
affineplane.dir3.create
Alias of affineplane.dir3.fromSpherical
affineplane.dir3.equal(d, dd)
Test if directions are strictly equal in value. The directions are compared as two vectors.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.dir3.fromSpherical(theta, phi)
Create a direction in 3D space from two angles. The angles correspond to azimuthal and polar angles in the spherical coordinates system when z-axis is considered the polar axis.
Parameters:
- theta
- a number, an angle in radians around z-axis from positive x-axis.
- Gives the direction on xy-plane.
- In geographical terms, a longitude when z-axis points the north pole.
- In spherical coordinate system, this is often called azimuthal angle.
- phi
- a number, an angle in radians from the positive z-axis.
- The angle π/2 corresponds to a direction perpendicular to z-axis.
- In geographical terms, a latitude if measured from the north pole.
- In spherical coordinate system, this is often called polar angle.
Returns:
- a dir3
Examples:
- Toward positive x-axis: dir3.fromSpherical(0, π/2)
- Toward positive y-axis: dir3.fromSpherical(π/2, π/2)
- Toward positive z-axis: dir3.fromSpherical(0, 0)
- Toward point (1,1,1): dir3.fromSpherical(π/4, π/4)
Aliases: affineplane.dir3.create
Source: fromSpherical.js
affineplane.dir3.fromVector(vec)
Create a new direction from a vector. Basically extract an unit vector from the vector. If the case of zero vector, return the default direction towards positive x-axis.
Parameters:
- vec
- a vec3, represented in the reference frame.
Returns:
- a dir3
Source: fromVector.js
affineplane.dir3.projectTo
Alias of affineplane.dir3.projectToPlane
affineplane.dir3.projectToPlane(dir, plane)
Project a 3D direction onto a 2D plane orthogonally. We cannot project 3D directions perspectively because they have no fixed position and the perspective position depends on the position.
Parameters:
Returns:
- a dir2 on the image plane.
Aliases: affineplane.dir3.projectTo
Source: projectToPlane.js
affineplane.dir3.toSpherical(dir)
Get theta and phi angles of spherical coordinate system for the given direction. The two angles are unique for all directions. The function is compatible with affineplane.dir3.fromSpherical
Parameters:
Returns:
- an object with properties
- theta
- a number, an angle in radians on the xy-plane when
- measured from positive x-axis and around z-axis.
- In geographical terms, if z-axis points the north pole, a longitude.
- In spherical coordinate system, this is often called azimuthal angle.
- phi
- a number, an angle in radians from the positive z-axis.
- In geographical terms, a latitude if measured from the north pole.
- In spherical coordinate system, this is often called the polar angle.
- theta
Source: toSpherical.js
affineplane.dir3.toVector(dir[, magn])
Parameters:
- dir
- a dir3
- magn
- optional number, default to 1. The magnitude of the vector to create.
- Note that a negative magnitude creates a vector to opposite direction.
Returns:
- a vec3
Source: toVector.js
affineplane.dir3.transitFrom(dir, plane)
Represent the direction on the reference plane without losing information. Note that plane translation or scale does not affect direction.
Parameters:
Returns:
- a dir3, represented on the reference plane.
Source: transitFrom.js
affineplane.dir3.transitTo(dir, target)
Transit a dir3 to a target plane. In other words, represent the direction in the coordinate system of the target plane.
Parameters:
- dir
- a number, a dir3 on the reference plane.
- target
- a plane3, the target plane, represented on the reference plane.
Returns:
- a dir3, represented on the target plane.
Source: transitTo.js
affineplane.dir3.validate(d)
Check if object is a valid dir3. Valid dir3 is an object with properties x,y,z that represent a unit vector.
Parameters:
- d
- an object
Returns:
- a boolean
Source: validate.js
affineplane.dist2
The distance measure is a directionless, always positive number (≥0). If transited between bases, only a change in the coordinate scale affects the distance. Rotation or translation of the basis does not change the distance measure.
Contents:
- affineplane.dist2.almostEqual
- affineplane.dist2.create
- affineplane.dist2.equal
- affineplane.dist2.projectTo
- affineplane.dist2.projectToPlane
- affineplane.dist2.transitFrom
- affineplane.dist2.transitTo
- affineplane.dist2.validate
Source: dist2/index.js
affineplane.dist2.almostEqual(c, d[, tolerance])
Test if distances c, d are almost equal by the margin of tolerance.
Parameters:
- c
- a number, the dist2
- d
- a number, the dist2
- tolerance
- optional number, default is affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.dist2.create(d)
Create a distance measure. Basically it is just the absolute value of the number.
Parameters:
- d
- a number
Returns:
- a number, always zero or positive.
Source: create.js
affineplane.dist2.equal(c, d)
Test if distances c, d are strictly equal.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.dist2.projectTo
Alias of affineplane.dist2.projectToPlane
affineplane.dist2.projectToPlane(dist, target[, camera])
Project a distance onto a target plane in 3D. The distance is assumed to be measured on the reference plane z=0. If camera is given, project perspectively. Otherwise, project orthogonally.
Parameters:
- dist
- a dist2 in the reference basis.
- target
- a plane3 in the reference basis.
- camera
- optional point3 in the reference basis.
Returns:
- a dist2 on the target plane.
Aliases: affineplane.dist2.projectTo
Source: projectToPlane.js
affineplane.dist2.transitFrom(dist, source)
Transit a distance from the source basis to the reference basis.
Parameters:
- dist
- a number, a dist2 distance measure in the source basis.
- source
- a plane2, the source plane, represented in the reference basis.
Returns:
- a number, a dist2, represented on the reference basis.
Source: transitFrom.js
affineplane.dist2.transitTo(dist, target)
Transit a dist2 to another basis. In other words, represent the distance in the coordinate system of the target.
Parameters:
- dist
- a number, a dist2 in the reference basis.
- target
- a plane2, the target basis, represented in the reference basis.
Returns:
- a number, a dist2 in the target basis.
Source: transitTo.js
affineplane.dist2.validate(d)
Check if the argument is a valid dist2. Valid dist2 is a zero or positive number and not NaN.
Parameters:
- d
- a value
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.dist3
The distance measure is a directionless, always positive number (≥0). When transited between bases, only a change in the coordinate scale affects the distance. Rotation or translation of the basis does not change the distance measure.
Contents:
- affineplane.dist3.almostEqual
- affineplane.dist3.create
- affineplane.dist3.equal
- affineplane.dist3.projectTo
- affineplane.dist3.projectToPlane
- affineplane.dist3.transitFrom
- affineplane.dist3.transitTo
- affineplane.dist3.validate
Source: dist3/index.js
affineplane.dist3.almostEqual(c, d[, tolerance])
Test if distances c, d are equal by the margin of tolerance.
Parameters:
- c
- a number, the dist3
- d
- a number, the dist3
- tolerance
- optional number, default is affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.dist3.create(d)
Create a measure. Basically it is just the absolute value of the number.
Parameters:
- d
- a number
Returns:
- a number, always zero or positive.
Source: create.js
affineplane.dist3.equal(c, d)
Test if distances c, d are strictly equal.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.dist3.projectTo
Alias of affineplane.dist3.projectToPlane
affineplane.dist3.projectToPlane(dist, target[, camera])
Project a distance onto a target plane in 3D basis. The distance is assumed to be measured on the plane z=0 of the reference basis. If camera is given, project perspectively. Otherwise, project orthogonally. Note that when projected perspectively, only the change of scale in the perspective projection affects the distance.
Parameters:
- dist
- a dist3 in the reference basis.
- target
- a plane3 in the reference basis.
- camera
- optional point3 in the reference basis.
Returns:
- a dist3 on the target plane.
Aliases: affineplane.dist3.projectTo
Source: projectToPlane.js
affineplane.dist3.transitFrom(dist, source)
Transit a distance from the source basis to the reference basis.
Parameters:
- dist
- a dist3, represented in the source basis.
- source
- a plane3, the source basis, represented in the reference basis.
Returns:
- a dist3, represented in the reference basis.
Source: transitFrom.js
affineplane.dist3.transitTo(dist, target)
Transit a dist3 to a target basis. In other words, represent the distance in the coordinate system of the basis.
Parameters:
- dist
- a dist3 in the reference basis.
- target
- a plane3, the target basis, represented in the reference basis.
Returns:
- a dist3 in the target basis.
Source: transitTo.js
affineplane.dist3.validate(d)
Check if the argument is a valid dist3. Valid dist3 is a zero or positive number and not NaN.
Parameters:
- d
- a value
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.epsilon
Default margin for non-strict numeric equality.
For example 0.0000000001.
Source: epsilon.js
affineplane.helm2
Provides functions for a special kind of 2D transformation matrices, two-dimensional Helmert transformations. These matrices represent translation, rotation, and uniform dilation. They are also known as affine non-reflective similarity transformations.
The functions expect the transformation as an object with properties
{ a, b, x, y }
Like vec2 and unlike point2, helm2 represents movement. Therefore it has no single position in space, and is not affected by plane translations. See affineplane.plane2 for a positional variant.
Contents:
- affineplane.helm2.addDilation
- affineplane.helm2.addRotation
- affineplane.helm2.almostEqual
- affineplane.helm2.almostEquals
- affineplane.helm2.clone
- affineplane.helm2.combine
- affineplane.helm2.compose
- affineplane.helm2.copy
- affineplane.helm2.create
- affineplane.helm2.det
- affineplane.helm2.determinant
- affineplane.helm2.equal
- affineplane.helm2.equals
- affineplane.helm2.fromArray
- affineplane.helm2.fromBasisVector
- affineplane.helm2.fromFeatures
- affineplane.helm2.fromPlane
- affineplane.helm2.fromPolar
- affineplane.helm2.fromVector
- affineplane.helm2.getDilation
- affineplane.helm2.getRotation
- affineplane.helm2.getScale
- affineplane.helm2.getTranslation
- affineplane.helm2.inverse
- affineplane.helm2.invert
- affineplane.helm2.limitDilation
- affineplane.helm2.multiply
- affineplane.helm2.projectTo
- affineplane.helm2.projectToCameraTransform
- affineplane.helm2.projectToPlane
- affineplane.helm2.rotateBy
- affineplane.helm2.scaleBy
- affineplane.helm2.setDilation
- affineplane.helm2.setRotation
- affineplane.helm2.setTranslation
- affineplane.helm2.setTranslation
- affineplane.helm2.snapRotation
- affineplane.helm2.solveLeft
- affineplane.helm2.solveRight
- affineplane.helm2.toArray
- affineplane.helm2.toMatrix
- affineplane.helm2.toString
- affineplane.helm2.transform
- affineplane.helm2.transitFrom
- affineplane.helm2.validate
Source: helm2/index.js
affineplane.helm2.addDilation(tr, delta)
Increase the scale multiplier of the transformation by addition. The rotation and translation properties are preserved.
Parameters:
- tr
- a helm2
- delta
- a number, the increment in scaling.
Returns:
- a helm2
Source: addDilation.js
affineplane.helm2.addRotation(tr, angle)
Increase rotation angle of the transformation by angle. The dilation and translation properties are preserved.
Parameters:
- tr
- a helm2
- rotation
- a number in radians
Returns:
- a helm2
Source: addRotation.js
affineplane.helm2.almostEqual(tr, ts[, epsilon])
Are two transforms almost equal? Return true if a matrix norm of the difference is smaller than epsilon. We use modified L1 norm aka Manhattan Distance to compute the difference.
Parameters:
- tr
- a helm2, a transform
- ts
- a helm2, a transform
- epsilon
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Aliases: affineplane.helm2.almostEquals
Source: almostEqual.js
affineplane.helm2.almostEquals
Alias of affineplane.helm2.almostEqual
affineplane.helm2.clone
Alias of affineplane.helm2.copy
affineplane.helm2.combine
Alias of affineplane.helm2.compose
affineplane.helm2.compose(tr, ts)
Multiply transformation matrix tr from the right with the given transformation matrix ts. In other words, transform the image of ts by tr.
Parameters:
Returns:
- a helm2
Aliases: affineplane.helm2.combine, affineplane.helm2.multiply
Source: compose.js
affineplane.helm2.copy(tr)
Parameters:
- tr
- a helm2, a transform
Returns:
- a helm2, a transform
Aliases: affineplane.helm2.clone
Source: copy.js
affineplane.helm2.create(a, b, x, y)
Create a 2D non-reflective similarity transform object.
Parameters:
- a
- a number. The diagonal of linear transformation.
- b
- a number. The upper and lower triangle of lin. transf.
- x
- a number. The translation towards x
- y
- a number. The translation towards y
Returns:
- a helm2, a transform object
Source: create.js
affineplane.helm2.det(tr)
The matrix determinant of the transformation. If the determinant equals zero then the matrix cannot be inverted and thus is not a valid transformation. In practice, determinants close to zero are also problematic due to floating point arithmetics.
Parameters:
- tr
- a helm2
Returns:
- a number, the determinant.
Aliases: affineplane.helm2.determinant
Source: det.js
affineplane.helm2.determinant(tr)
Alias of affineplane.helm2.det
affineplane.helm2.equal(tr, ts)
Are transforms exactly equal? Note that due to floating-point arithmetics, computation might cause exact equality to be broken. See affineplane.helm2.almostEqual for relaxed alternative.
Parameters:
Returns:
- a boolean
Aliases: affineplane.helm2.equals
Source: equal.js
affineplane.helm2.equals
Alias of affineplane.helm2.equal
affineplane.helm2.fromArray(abxy)
Create an affine similarity transform from 4-element array.
Parameters:
- abxy
- an array with four number elements
[a, b, x, y]
- an array with four number elements
Returns:
- a helm2, a similarity transform.
Source: fromArray.js
affineplane.helm2.fromBasisVector(vec)
Create a linear transformation from the basis vector for x-axis. This uniquely determines the basis vector for y-axis, at 90 degrees clock-wise.
Parameters:
- vec
- a vec2, the basis vector for x-axis.
Returns:
- a helm2, but with zero translation.
Source: fromBasisVector.js
affineplane.helm2.fromFeatures(feats)
Create a helm2 transformation from human-readable features.
Parameters:
- feats
- object with properties:
- dilation
- a number, a multiplier
- rotation
- a number, in radians
- translation
- a vec2, the displacement vector
- dilation
- object with properties:
Returns:
- a helm2
Source: fromFeatures.js
affineplane.helm2.fromPlane(plane, origin)
Capture a Helmert transform from a plane. In other words, convert a passive affine transformation to an active one. The result answers to the task: create such Helmert transformation so that when applied to an identity plane at the given origin, it transforms the plane so that the result is equal to the given plane.
Parameters:
Returns:
- a helm2 on the reference plane
Source: fromPlane.js
affineplane.helm2.fromPolar(scale, rotation[, tx[, ty]])
Create a transform object by using scale magnitude, rotation angle, and translation.
Parameters:
- scale
- a number, the scaling factor
- rotation
- a number, rotation in radians from positive x-axis towards pos. y-axis.
- tx
- optional number, translation toward positive x. Default 0.
- ty
- optional number, translation toward positive y. Default 0.
Returns:
- a helm2, a transform object
Precondition:
- scale must be positive
Source: fromPolar.js
affineplane.helm2.fromVector(vec)
Create a helm2 transformation from a translation vector.
Parameters:
- vec
- a vec2, the displacement vector
Returns:
- a helm2
Source: fromVector.js
affineplane.helm2.getDilation(tr)
Get the dilation component of the transformation.
Parameters:
- tr
- a helm2
Returns:
- a number, the scale multiplier.
Aliases: affineplane.helm2.getScale
Source: getDilation.js
affineplane.helm2.getRotation(tr)
Get the rotation component of the transform in radians.
Parameters:
- tr
- a helm2
Returns:
- a number, in radians
Source: getRotation.js
affineplane.helm2.getScale
Alias of affineplane.helm2.getDilation
affineplane.helm2.getTranslation(tr)
Get translation component of the transformation as a vector.
Parameters:
- tr
- a helm2
Returns:
- a vec2
Source: getTranslation.js
affineplane.helm2.inverse(tr)
Alias of affineplane.helm2.invert
affineplane.helm2.invert(tr)
Invert the transform. A transform from B to C becomes a transform from C to B.
Parameters:
- tr
- a helm2
Returns:
- a helm2, inversed transform
Aliases: affineplane.helm2.inverse
Source: invert.js
affineplane.helm2.limitDilation(tr, min, max)
Limit the dilating/scaling component of the transformation between min and max (inclusive).
Parameters:
- tr
- a helm2, in the reference basis.
- min
- a number, the minimum dilation relative to the reference basis. Must be positive.
- max
- a number, the maximum dilation relative to the reference basis. Must be positive.
Returns:
- a helm2
Source: limitDilation.js
affineplane.helm2.multiply
Alias of affineplane.helm2.compose
affineplane.helm2.projectTo
Alias of affineplane.helm2.projectToPlane
affineplane.helm2.projectToCameraTransform(helm, origin, camera)
Convert the dilation in the transform to a translation of the camera, so that the plane would dilate the same amount due to the perspective. This can be used to convert pinch gestures to forward movement. Also invert rotation and translation for camera movement.
Parameters:
- helm
- a helm2 in the reference basis. Applied at origin.
- origin
- a point3 in the reference basis. Position of the transform.
- camera
- a point3, in the reference basis.
Returns:
- a helm3, with scale of 1, in the reference basis.
Source: projectToCameraTransform.js
affineplane.helm2.projectToPlane(tr, plane[, camera])
Project transformation onto a plane. If camera is given, project perspectively. Projection does not affect the dilation or rotation property of the tr. Projection only affects the scale of the translation.
Parameters:
- tr
- a helm2 on the reference plane z=0.
- plane
- a plane3 in the reference space. The projection plane.
- camera
- optional point3 in the reference space. The camera position. Set for perspective projection.
Returns:
- a helm2 on the projection plane.
Aliases: affineplane.helm2.projectTo
Source: projectToPlane.js
affineplane.helm2.rotateBy(tr, radians)
Rotate image of the transform by the given radians. This changes the direction of the translation but preserves the scaling and rotating effects.
Parameters:
- tr
- a helm2, a transform
- radians
- a number, angle in radians
Returns:
- a helm2, a transform
Source: rotateBy.js
affineplane.helm2.scaleBy(tr, multiplier)
Scale image of the transform by the given multiplier. Dilation and translation are multiplied, rotation and translation direction are preserved.
Parameters:
- tr
- a helm2, a transform on the reference plane.
- multiplier
- a number
Returns:
- a helm2, a transform
Source: scaleBy.js
affineplane.helm2.setDilation(tr, dilation)
Replace scaling of the transformation. The rotation and translation properties are preserved.
Parameters:
- tr
- a helm2
- dilation
- a number
Returns:
- a helm2
Source: setDilation.js
affineplane.helm2.setRotation(tr, angle)
Replace rotation angle of the transformation. The dilation and translation properties are preserved.
Parameters:
- tr
- a helm2
- rotation
- a number in radians
Returns:
- a helm2
Source: setRotation.js
affineplane.helm2.setTranslation(tr, vec)
Increase translation property of the transformation by a vector. The dilation and rotation properties are preserved.
Parameters:
Returns:
- a helm2
Source: addTranslation.js
affineplane.helm2.setTranslation(tr, vec)
Replace translation property of the transformation. The dilation and rotation properties are preserved.
Parameters:
Returns:
- a helm2
Source: setTranslation.js
affineplane.helm2.snapRotation(tr)
Round the rotation property of the transformation to nearest orthogonal angle 0, 90, 180, and 270 deg. Note that if the given transform has exact 45, 135, 225, or 315 deg rotation then the nearest orthogonal angle is arbitrarily either the next or previous orthogonal angle due to the variation caused by floating-point arithmetics.
Parameters:
- tr
- a helm2
Returns:
- a helm2
Source: snapRotation.js
affineplane.helm2.solveLeft(tb, tc)
Given transforms B, C, find transform A, where AB = C. Given that B is invertible, then A = C * iB.
Parameters:
Returns:
- a helm2, a transform
Source: solveLeft.js
affineplane.helm2.solveRight(ta, tc)
Given the transforms A and C, find the transform B, where A * B = C. Given that A is invertible, then B = iA * C.
Parameters:
Returns:
- a helm2, a transform
Source: solveRight.js
affineplane.helm2.toArray(tr)
Returns: an array representation of the transformation. Compatible with affineplane.helm2.fromArray.
Parameters:
- tr
- a helm2
Returns:
- an array,
[a, b, x, y]
Source: toArray.js
affineplane.helm2.toMatrix(tr)
Get the similarity transformation matrix in the format common to other APIs, including:
- WebKitCSSMatrix alias DOMMatrix
- kld-affine
- MDN documentation in some parts
Parameters:
- tr
- a helm2
Returns:
{ a, b, c, d, e, f }
Source: toMatrix.js
affineplane.helm2.toString(tr)
Convert the transformation to a string compatible with the CSS
transform-function data type, for example matrix(1, 2, -2, 1, 3, 4).
Together with affineplane.helm2.fromString(…), this method enables
helm2 serialization to and from strings.
Parameters:
- tr
- a helm2
Returns:
- a string, CSS transform
Source: toString.js
affineplane.helm2.transform(tr, ts)
Multiply transformation matrix tr from the left with the given transformation matrix ts. In other words, transform the image of tr by ts.
For multiplication from right, see affineplane.helm2.compose.
Parameters:
Returns:
- a helm2
Source: transform.js
affineplane.helm2.transitFrom(tr, plane)
Transit a helm2 from the source plane to the reference plane. Note that:
- scale and rotation of the plane affects only the translating property of helm2, so that the direction of translation is preserved.
- translation of the plane does not affect helm2 at all.
- scaling and rotation properties of helm2 are preserved as is.
Parameters:
- tr
- a helm2 transformation on the source plane.
- plane
- a plane2, the source plane, represented on the reference plane.
Returns:
- a helm2, represented on the reference plane.
Source: transitFrom.js
affineplane.helm2.validate(tr)
Check if object is a valid helm2.
Parameters:
- tr
- an object
Returns:
- a boolean
Source: validate.js
affineplane.helm3
Functions for a special 3D affine transformation that consists of a translation in 3D, rotation around z-axis, and uniform scaling, alias dilation. In other words, the transformation is a 3D Helmert transformation with a limited ability to rotate only about z-axis.
A helm3 is an object { a, b, x, y, z }
Like vec3 and unlike point3, helm3 represents movement. Therefore it has no single position in space, and is not affected by plane translations. See affineplane.plane3 for a positional variant.
Contents:
- affineplane.helm3.addDilation
- affineplane.helm3.addRotation
- affineplane.helm3.addTranslation
- affineplane.helm3.almostEqual
- affineplane.helm3.almostEquals
- affineplane.helm3.clone
- affineplane.helm3.combine
- affineplane.helm3.compose
- affineplane.helm3.copy
- affineplane.helm3.create
- affineplane.helm3.det
- affineplane.helm3.determinant
- affineplane.helm3.difference
- affineplane.helm3.equal
- affineplane.helm3.equals
- affineplane.helm3.fromArray
- affineplane.helm3.fromBasisVector
- affineplane.helm3.fromFeatures
- affineplane.helm3.fromPlane
- affineplane.helm3.fromVector
- affineplane.helm3.getDilation
- affineplane.helm3.getRotation
- affineplane.helm3.getScale
- affineplane.helm3.getTranslation
- affineplane.helm3.inverse
- affineplane.helm3.invert
- affineplane.helm3.limitDilation
- affineplane.helm3.projectTo
- affineplane.helm3.projectToPlane
- affineplane.helm3.rotateBy
- affineplane.helm3.scaleBy
- affineplane.helm3.setDilation
- affineplane.helm3.setRotation
- affineplane.helm3.setTranslation
- affineplane.helm3.toArray
- affineplane.helm3.toMatrix
- affineplane.helm3.transitFrom
- affineplane.helm3.transitTo
- affineplane.helm3.translateBy
- affineplane.helm3.validate
Source: helm3/index.js
affineplane.helm3.addDilation(tr, delta)
Increase the scale multiplier of the transformation by addition. The rotation and translation properties are preserved.
Parameters:
- tr
- a helm3
- delta
- a number, the increment in scaling.
Returns:
- a helm3
Source: addDilation.js
affineplane.helm3.addRotation(tr, angle)
Increase rotation angle of the transformation by an angle. The dilation and translation properties are preserved.
Parameters:
- tr
- a helm3
- rotation
- a number in radians
Returns:
- a helm3
Source: addRotation.js
affineplane.helm3.addTranslation(tr, vec)
Modify transformation so that its image is translated by the given vector. In other words it transforms points further by the given vector.
Parameters:
Returns:
- a helm3, a transform
Aliases: affineplane.helm3.translateBy
Source: addTranslation.js
affineplane.helm3.almostEqual(tr, ts[, epsilon])
Are two transforms almost equal? Return true if a matrix norm of the difference is smaller than epsilon. We use modified L1 norm aka Manhattan Distance to compute the difference.
Parameters:
- tr
- a helm3, a transform
- ts
- a helm3, a transform
- epsilon
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean, true if equal
Aliases: affineplane.helm3.almostEquals
Source: almostEqual.js
affineplane.helm3.almostEquals
Alias of affineplane.helm3.almostEqual
affineplane.helm3.clone
Alias of affineplane.helm3.copy
affineplane.helm3.combine
Alias of affineplane.helm3.compose
affineplane.helm3.compose(tr, ts)
Multiply the helm3 matrix tr from the right with the helm3 matrix ts. In other words, transform the image of ts by tr.
Parameters:
Returns:
- a helm3
Aliases: affineplane.helm3.combine
Source: compose.js
affineplane.helm3.copy(tr)
Parameters:
- tr
- a helm3, a transform
Returns:
- a helm3, a transform
Aliases: affineplane.helm3.clone
Source: copy.js
affineplane.helm3.create(a, b, x, y, z)
Create a new helm3 object.
Parameters:
- a
- number, linear transform basis vector element
- b
- number, linear transform basis vector element
- x
- number, change in horizontal position
- y
- number, change in vertical position
- z
- number, change in depth
Returns:
- a helm3
Source: create.js
affineplane.helm3.det(tr)
The matrix determinant of the transformation. If the determinant equals zero then the matrix cannot be inverted and thus is not a valid transformation. In practice, determinants close to zero are also problematic due to floating point arithmetics.
Parameters:
- tr
- a helm3
Returns:
- a number, the determinant.
Aliases: affineplane.helm3.determinant
Source: det.js
affineplane.helm3.determinant(tr)
Alias of affineplane.helm3.det
affineplane.helm3.difference(h, hh)
Compute a transformation that maps the codomain of hh to the codomain of h. In other words, find transformation T such that Thh = h <=> T = hinv(hh). The result is the difference between the transformations h and hh.
Parameters:
Returns:
- a helm3
Source: difference.js
affineplane.helm3.equal(tr, ts)
True if transformations are exactly equal. Note that due to floating-point arithmetics, computation might cause exact equality to be broken. See affineplane.helm3.almostEqual for a relaxed alternative.
Parameters:
Returns:
- a boolean
Aliases: affineplane.helm3.equals
Source: equal.js
affineplane.helm3.equals
Alias of affineplane.helm3.equal
affineplane.helm3.fromArray(arr)
Create an affine similarity transform from 5-element array.
Parameters:
- arr
- an array of five numbers
[a, b, x, y, z]
- an array of five numbers
Returns:
- a helm3
Source: fromArray.js
affineplane.helm3.fromBasisVector(vec)
Create a linear transformation from the basis vector for x-axis. This basis vector is limited to 2D and does not have z-component. This uniquely determines the basis vector for y-axis, at 90 degrees clock-wise, and consequently the z-axis according to the right-hand rule.
Parameters:
- vec
- a vec2, the basis vector for x-axis in the xy-plane of the reference basis.
Returns:
- a helm2z, but with zero translation.
Source: fromBasisVector.js
affineplane.helm3.fromFeatures(feats)
Create a helm3 transformation from human-readable features.
Parameters:
- feats
- object with properties:
- dilation
- a number, a scale multiplier
- rotation
- a number, delta angle in radians
- translation
- a vec3, the displacement vector
- dilation
- object with properties:
Returns:
Source: fromFeatures.js
affineplane.helm3.fromPlane(plane, origin)
Capture a Helmert transform from a plane. In other words, convert a passive affine transformation to an active one. The result answers to the task: create such Helmert transformation so that when applied to an identity plane at the given origin, it transforms the plane so that the result is equal to the given plane.
Parameters:
Returns:
- a helm3 on the reference plane
Source: fromPlane.js
affineplane.helm3.fromVector(vec)
Create a helm3 transformation from a translation vector.
Parameters:
- vec
- a vec3, the displacement vector
Returns:
- a helm3
Source: fromVector.js
affineplane.helm3.getDilation(tr)
Get the dilation component of the transformation.
Parameters:
- tr
- a helm3
Returns:
- a number, the scale multiplier.
Aliases: affineplane.helm3.getScale
Source: getDilation.js
affineplane.helm3.getRotation(tr)
Get the rotation component of the transform in radians. This is rotation around z-axis to right hand direction.
Parameters:
- tr
- a helm3
Returns:
- a number, angle in radians
Source: getRotation.js
affineplane.helm3.getScale
Alias of affineplane.helm3.getDilation
affineplane.helm3.getTranslation(tr)
Get translation component of the transformation as a vector.
Parameters:
- tr
- a helm3
Returns:
- a vec3
Source: getTranslation.js
affineplane.helm3.inverse(tr)
Alias of affineplane.helm3.invert
affineplane.helm3.invert(tr)
Invert the transform. A transform from B to C becomes a transform from C to B.
Parameters:
- tr
- a helm3
Returns:
- a helm3, inversed transform
Aliases: affineplane.helm3.inverse
Source: invert.js
affineplane.helm3.limitDilation(tr, min, max)
Limit the dilating/scaling component of the transformation between min and max (inclusive).
Parameters:
- tr
- a helm3, in the reference basis.
- min
- a number, the minimum dilation measured in the reference basis. Must be positive.
- max
- a number, the maximum dilation measured in the reference basis. Must be positive.
Returns:
- a helm3
Source: limitDilation.js
affineplane.helm3.projectTo
Alias of affineplane.helm3.projectToPlane
affineplane.helm3.projectToPlane(tr, plane)
Project transformation onto a plane orthogonally. The transformation loses z translation.
Parameters:
Returns:
- a helm2 on the image plane.
Aliases: affineplane.helm3.projectTo
Source: projectToPlane.js
affineplane.helm3.rotateBy(tr, radians)
Rotate image of the transform by the given radians around z-axis. This rotates the direction of the translation but preserves the scaling and rotating effects as well as the translation along z.
Parameters:
- tr
- a helm3, a transform
- radians
- a number, angle in radians
Returns:
- a helm3, a transform
Source: rotateBy.js
affineplane.helm3.scaleBy(tr, multiplier)
Scale image of the transform by the given multiplier. Dilation and translation are multiplied, rotation and translation direction are preserved. Note that also translation along z becomes multiplied.
Parameters:
- tr
- a helm3, a transform on the reference plane.
- multiplier
- a number
Returns:
- a helm3, a transform
Source: scaleBy.js
affineplane.helm3.setDilation(tr, dilation)
Replace scaling of the transformation. The rotation and translation properties are preserved.
Parameters:
- tr
- a helm3
- dilation
- a number
Returns:
- a helm3
Source: setDilation.js
affineplane.helm3.setRotation(tr, angle)
Replace rotation angle of the transformation. The dilation and translation properties are preserved.
Parameters:
- tr
- a helm3
- rotation
- a number in radians
Returns:
- a helm3
Source: setRotation.js
affineplane.helm3.setTranslation(tr, vec)
Replace translation property of the transformation. The dilation and rotation properties are preserved.
Parameters:
Returns:
- a helm3
Source: setTranslation.js
affineplane.helm3.toArray(tr)
Serializes the transformation into an array representation. Compatible with affineplane.helm3.fromArray.
Parameters:
- tr
- a helm3
Returns:
- an array
[a, b, x, y, z]
Source: toArray.js
affineplane.helm3.toMatrix(tr)
Get the transformation as a 4x4 homogeneous 3D transformation matrix, using indexing similar to MDN matrix3d article.
Parameters:
- tr
- a helm3
Returns:
- an object with properties:
{ a1, a2, a3, a4, b1, b2, b3, b4, c1, c2, c3, c4 d1, d2, d3, d4 }
Elements are constructed like this:
┌ ┐ ┌ ┐
│ tr.a -tr.b 0 tr.x │ │ a1 a2 a3 a4 │
│ tr.b tr.a 0 tr.y │ = │ b1 b2 b3 b4 │
│ 0 0 m tr.z │ │ c1 c2 c3 c4 │
│ 0 0 0 1 │ │ d1 d2 d3 d4 │
└ ┘ └ ┘
where m = sqrt(tr.a*tr.a + tr.b*tr.b)
Source: toMatrix.js
affineplane.helm3.transitFrom(tr, source)
Transit a helm3 from the source plane to the reference plane.
Parameters:
- tr
- a helm3 transformation on the source plane.
- source
- a plane3, the source plane, represented on the reference plane.
Returns:
- a helm3, represented on the reference plane.
Invariants:
- scale and rotation of the plane affects only the translating property of helm3, so that the direction of translation is preserved.
- translation of the plane does not affect helm3 at all.
- scaling and rotation properties of helm3 are preserved as is.
Source: transitFrom.js
affineplane.helm3.transitTo(tr, target)
Transit a helm3 to a target plane. In other words, represent the helm3 in the coordinate system of the plane.
Parameters:
- tr
- a helm3 transformation represented on the reference plane.
- target
- a plane3, the target plane, represented on the reference plane.
Returns:
- a helm3, represented on the target plane.
Source: transitTo.js
affineplane.helm3.translateBy
Alias of affineplane.helm3.addTranslation
affineplane.helm3.validate(tr)
Check if object is a valid helm3.
Parameters:
- tr
- an object
Returns:
- a boolean, true if valid helm3
Source: validate.js
affineplane.line2
Directed line object with origin point in space and a spanning vector.
A line2 is an object { origin: {x,y}, span: {x,y} }
Contents:
- affineplane.line2.at
- affineplane.line2.create
- affineplane.line2.fromPoints
- affineplane.line2.intersection
- affineplane.line2.normal
- affineplane.line2.validate
Source: line2/index.js
affineplane.line2.at(line, c)
Get a point on the line at position c from the line origin. For example c=2 gives a point at two spanning vectors away from the origin.
Parameters:
- line
- a line2
- c
- a number, one-dimensional coordinate along the line
Returns:
- a point2
Source: at.js
affineplane.line2.create(origin, span)
Create a line from an origin point and a spanning vector.
Parameters:
Returns:
- a line2
Source: create.js
affineplane.line2.fromPoints(p, q)
Create a line from two points with a spanning vector from p to q.
Parameters:
Returns:
- a line2
Source: fromPoints.js
affineplane.line2.intersection(l, ll)
Find intersection point between two lines, if any. If the lines are parallel but not equal, no intersection exist and therefore the result is null. If the lines are equal, while the whole line would be the true intersection, the result is the origin point of the first line.
Parameters:
Returns:
- a point2 or null
Source: intersection.js
affineplane.line2.normal(line)
Get a normal vector for the line. It is perpendicular to the line. Note that a line has two normal vectors, one for each side. The returned normal is the one at the right hand.
Parameters:
- line
- a line2
Returns:
- a vec2, a vector perpendicular to the line.
Source: normal.js
affineplane.line2.validate(obj)
Check if the object is a valid line2. Valid line2 has origin and span properties that are valid point2 and vec2, respectively.
Parameters:
- obj
- an object, the line candidate.
Returns:
- a boolean, true if valid line2
Source: validate.js
affineplane.line3
Directed line object in 3D, Represented as an origin point and a spanning vector.
A line3 is an object { origin: {x,y,z}, span: {x,y,z} }
Contents:
- affineplane.line3.at
- affineplane.line3.create
- affineplane.line3.fromPoints
- affineplane.line3.intersection
- affineplane.line3.validate
Source: line3/index.js
affineplane.line3.at(line, c)
Get a point on the line at position c from the line origin. For example c=2 gives a point at two spanning vectors away from the origin.
Parameters:
- line
- a line3
- c
- a number
Returns:
- a point3
Source: at.js
affineplane.line3.create(origin, span)
Create a 3d line from an origin point and a spanning vector.
Parameters:
Returns:
- a line3
Source: create.js
affineplane.line3.fromPoints(p, q)
Create a line from two points with a spanning vector from p to q.
Parameters:
Returns:
- a line3
Source: fromPoints.js
affineplane.line3.intersection(l, ll)
Find intersection point between two lines, if any. If the lines are parallel but not equal, or the lines are skew, no intersection exist and therefore the result is null. If the lines are equal, while the whole line would be the true intersection. However, in this case we pick the origin point of the first line.
Parameters:
Returns:
- a point3 or null
Source: intersection.js
affineplane.line3.validate(line)
Check if the object is a valid line3. Valid line3 has origin and span properties that are valid point3 and vec3, respectively.
Parameters:
- line
- an object
Returns:
- a boolean, true if valid line2
Source: validate.js
affineplane.orient2
Orientation in 2D. Represented by an object { a, b }.
Contents:
- affineplane.orient2.almostEqual
- affineplane.orient2.create
- affineplane.orient2.equal
- affineplane.orient2.fromPolar
- affineplane.orient2.fromVector
- affineplane.orient2.transitFrom
- affineplane.orient2.transitTo
- affineplane.orient2.validate
Source: orient2/index.js
affineplane.orient2.almostEqual(p, q[, tolerance])
Test if two orientations are almost equal within the tolerance.
Parameters:
- p
- an orient2
- q
- an orient2
- tolerance
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.orient2.create(a, b)
Parameters:
- a
- a number
- b
- a number
Returns:
- a orient2
Source: create.js
affineplane.orient2.equal(p, q)
Test if two orientations are strictly equal in value.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.orient2.fromPolar(direction)
Create an orientation from angle or vector.
Parameters:
Returns:
- an orient2
Aliases: affineplane.orient2.fromVector
Source: fromPolar.js
affineplane.orient2.fromVector(vec)
Alias of affineplane.orient2.fromPolar
affineplane.orient2.transitFrom(r, source)
Transit an orientation from the source basis to the reference basis.
Parameters:
- r
- a orient2 in the source basis.
- source
- a plane2, the source basis, represented in the reference basis.
Returns:
- a orient2, represented in the reference basis.
Source: transitFrom.js
affineplane.orient2.transitTo(r, target)
Transit a orient2 to a target basis. In other words, represent the direction in the coordinate system of the target basis.
Parameters:
- r
- a number, a orient2 in the reference basis.
- target
- a plane2, the target basis, represented in the reference basis.
Returns:
- a orient2 in the target basis.
Source: transitTo.js
affineplane.orient2.validate(r)
Check if the object is a valid orient2. Valid object has properties a and b which represent valid rotation matrix.
Parameters:
- r
- an object
Returns:
- a boolean
Source: validate.js
affineplane.path2
Two-dimensional path; Array of point2; Open sequence of points; Does not form a polygon but a sequence of line segments.
Example: [{ x, y }, { x, y }, ...]
Contents:
- affineplane.path2.combine
- affineplane.path2.create
- affineplane.path2.transitFrom
- affineplane.path2.transitTo
- affineplane.path2.validate
Source: path2/index.js
affineplane.path2.combine(pa, pb)
Combine paths together.
Parameters:
Returns:
- a path2
Source: combine.js
affineplane.path2.create(points)
Create a path on plane. Deep-clones the points array.
Parameters:
- points
- array of point2
Returns:
- a path2, array of points
Source: create.js
affineplane.path2.transitFrom(path, source)
Represent a path on the reference basis.
Parameters:
- path
- a path2, represented on the source basis.
- source
- a plane2, the source basis, represented on the reference basis.
Returns:
- a path2, represented on the reference basis.
Source: transitFrom.js
affineplane.path2.transitTo(path, target)
Transit a path to the target basis.
Parameters:
- path
- a path2, on the reference basis.
- target
- a plane2, the target basis, represented on the reference basis.
Returns:
- a path2, represented on the target basis.
Source: transitTo.js
affineplane.path2.validate(p)
Check if the object is a valid path2. A valid path2 is an array of valid point2 objects.
Parameters:
- p
- an object
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.path3
Three-dimensional path; Array of point3; Open sequence of points; Does not form a polygon but a sequence of line segments.
Example: [{ x, y, z }, { x, y, z }, ...]
Contents:
- affineplane.path3.combine
- affineplane.path3.create
- affineplane.path3.projectTo
- affineplane.path3.projectToPlane
- affineplane.path3.transitFrom
- affineplane.path3.transitTo
- affineplane.path3.validate
Source: path3/index.js
affineplane.path3.combine(pa, pb)
Combine paths together.
Parameters:
Returns:
- a path3
Source: combine.js
affineplane.path3.create(points)
Create a path on plane. Deep-clones the points array.
Parameters:
- points
- array of point3
Returns:
- a path3, array of points
Source: create.js
affineplane.path3.projectTo
Alias of affineplane.path3.projectToPlane
affineplane.path3.projectToPlane(path, plane[, camera])
Project a 3D path onto a 2D plane orthogonally. Project perspectively if a camera position is given.
Parameters:
- path
- a path3, in the reference basis.
- plane
- a plane3, in the reference basis. The image plane to which to project.
- camera
- a point3, in the reference basis. The location of the camera.
Returns:
- a path2 on the image plane.
Aliases: affineplane.path3.projectTo
Source: projectToPlane.js
affineplane.path3.transitFrom(path, source)
Represent a path on the reference basis.
Parameters:
- path
- a path3, represented on the source basis.
- source
- a plane3, the source basis, represented on the reference basis.
Returns:
- a path3, represented on the reference basis.
Source: transitFrom.js
affineplane.path3.transitTo(path, target)
Transit a path to the target basis.
Parameters:
- path
- a path3, on the reference basis.
- target
- a plane3, the target basis, represented on the reference basis.
Returns:
- a path3, represented on the target basis.
Source: transitTo.js
affineplane.path3.validate(p)
Check if the object is a valid path3. A valid path3 is an array of valid point3 objects.
Parameters:
- p
- an object
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.plane2
A 2D euclidean plane.
A plane is a 2D Helmert transformation from the plane coordinates to a reference coordinate system called the reference plane. The transform defines the scale and angle of the plane and its origin position on the reference.
The plane is represented with an object { a, b, x, y }.
See the illustration below for visual explanation of these properties.
For example { a: 1, b: 0, x: 0, y: 0 } defines a plane
is an exact copy of its reference plane. For another example
{ a: 1, b: 0, x: 20, y: 0 } defines a plane which
is located +20 units along x-axis of the reference plane.
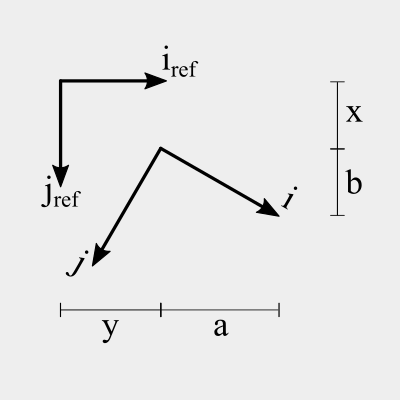
Contents:
- affineplane.plane2.IDENTITY
- affineplane.plane2.almostEqual
- affineplane.plane2.at
- affineplane.plane2.between
- affineplane.plane2.compose
- affineplane.plane2.copy
- affineplane.plane2.create
- affineplane.plane2.difference
- affineplane.plane2.equal
- affineplane.plane2.fromFeatures
- affineplane.plane2.fromHelmert
- affineplane.plane2.getScale
- affineplane.plane2.invert
- affineplane.plane2.limitScale
- affineplane.plane2.orientation
- affineplane.plane2.projectTo
- affineplane.plane2.projectToPlane
- affineplane.plane2.rotateBy
- affineplane.plane2.rotateTo
- affineplane.plane2.rotateToOrtho
- affineplane.plane2.scaleBy
- affineplane.plane2.scaleTo
- affineplane.plane2.transform
- affineplane.plane2.transformInside
- affineplane.plane2.transitFrom
- affineplane.plane2.transitTo
- affineplane.plane2.translateBy
- affineplane.plane2.translateTo
- affineplane.plane2.validate
Source: plane2/index.js
affineplane.plane2.IDENTITY
The identity plane is identical to its reference plane.
Source: plane2/index.js
affineplane.plane3.IDENTITY
The identity plane is identical to its reference plane.
Source: plane3/index.js
affineplane.plane2.almostEqual(pa, pb[, tolerance])
Test if two planes are almost equal.
Parameters:
- pa
- a plane2
- pb
- a plane2
- tolerance
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.plane2.at(plane, x, y)
Take a point on the plane and transit it to the reference basis.
Parameters:
- plane
- a plane2, in the reference basis.
- x
- a number, the horizontal coordinate on the plane
- y
- a number, the vertical coordinate on the plane
Returns:
- a point2 in the reference basis.
Source: at.js
affineplane.plane2.between
Alias of affineplane.plane2.difference
affineplane.plane2.compose(planea, planeb)
Combine two planes together.
Parameters:
Returns:
- a plane2 on the reference plane
Source: compose.js
affineplane.plane2.copy(plane)
Clone the plane object.
Parameters:
- plane
- a plane2
Returns:
- a plane2
Source: copy.js
affineplane.plane2.create(origin, span)
Create a plane2 from an origin point and a basis vector.
Parameters:
- origin
- a point2 on the reference plane.
- span
- a vec2 on the reference plane. This vector is the basis vector for the x-axis of the plane. The basis vector for y can be found 90deg clockwise from x-axis.
Returns:
- a plane2
Source: create.js
affineplane.plane2.difference(p, pp)
Find the difference between two planes. In other words, compute such transformation T that maps the plane pp to the plane p.
Parameters:
Returns:
- a helm2, in the reference basis.
Aliases: affineplane.plane2.between
Source: difference.js
affineplane.plane2.equal(p1, p2)
Test if two planes are strictly equal in their properties. See affineplane.plane2.almostEqual for a relaxed alternative.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.plane2.fromFeatures(feats)
Create a plane from human readable features.
Parameters:
- feats
- an object with optional props:
- angle
- a number, angle in radians with respect to the reference plane.
- scale
- a number, scale multiplier with respect to the reference plane.
- origin
- a point2, the plane origin point on the reference plane.
- angle
- an object with optional props:
Returns:
- a plane2
Source: fromFeatures.js
affineplane.plane2.fromHelmert(tr, origin)
Create a plane by transforming an identity plane about the given transform origin. For example, you can create a plane that has been rotated around a point (100, 100). The choice of transform origin does not affect scale or rotation of the created plane but does affect its translative component.
Parameters:
Returns:
- a plane2 on the reference plane
Source: fromHelmert.js
affineplane.plane2.getScale(plane)
The length of the vector.
Parameters:
- plane
- a plane2 on the reference plane
Returns:
- a number, the scale multiplier with respect to the reference plane.
Source: getScale.js
affineplane.plane2.invert(plane)
A plane is a mapping from the plane’s coordinates onto the reference plane. The inversion of the plane switches the roles so that the result is the reference plane, represented in the coordinates of the given plane.
Parameters:
- plane
- a plane2, the plane to invert represented on the reference plane.
Returns:
- a plane2, the reference plane represented on the given plane.
Source: invert.js
affineplane.plane2.limitScale(plane, min, max)
Limit the scale the plane transformation between min and max (inclusive).
Parameters:
- plane
- a plane2, in the reference basis.
- min
- a number, the minimum scale measured in the reference basis. Must be positive.
- max
- a number, the maximum scale measured in the reference basis. Must be positive.
Returns:
- a plane2
Source: limitScale.js
affineplane.plane2.orientation(plane)
The orientation of the plane, i.e. the rotation from default. If the plane is singular, falls back to the default orientation.
Parameters:
- plane
- a plane2, in the reference basis
Returns:
- a orient2, in the reference basis
Source: orientation.js
affineplane.plane2.projectTo
Alias of affineplane.plane2.projectToPlane
affineplane.plane2.projectToPlane(plane, target[, camera])
Project a 2D plane from reference to the target parallel 2D plane in 3D. If camera is given, project perspectively, otherwise orthogonally.
Parameters:
- plane
- a plane2 in the reference space, z=0.
- target
- a plane3 in the reference space. The image plane to which to project.
- camera
- optional point3 in the reference space.
Returns:
- a plane2 on the image plane.
Aliases: affineplane.plane2.projectTo
Source: projectToPlane.js
affineplane.plane2.rotateBy(plane, center, radians)
Rotate the given plane on the reference plane around a center point.
Parameters:
- plane
- a plane2 on the reference plane. The plane to rotate.
- center
- a point2, a point on the reference plane.
- radians
- a number, angle in radians, direction x->y.
Returns:
- a plane2 on the reference plane after rotation.
Source: rotateBy.js
affineplane.plane2.rotateTo(plane, center, radians)
Rotate the plane around a point so that after the rotation, the x-axis of the plane points to the given direction. The center point stays fixed during the operation.
Parameters:
- plane
- a plane2, the plane to rotate. Represented on the reference plane.
- center
- a point2, the point around which to rotate. Represented on the reference plane.
- radians
- a number, angle to rotate to. Relative to the reference plane x-axis.
Returns:
- a plane2, the plane after rotation.
Source: rotateTo.js
affineplane.plane2.rotateToOrtho(plane, center)
Rotate plane to nearest orthogonal angle 0, 90, 180, and 270 deg with respect to the reference plane.
Parameters:
Returns:
- a plane2
Note that if the plane is at the middle of two ortho angles, namely at 45, 135, 225, or 315 deg, then the nearest orthogonal angle is arbitrarily either the next or previous orthogonal angle due to the small variations caused by floating-point arithmetics.
Source: rotateToOrtho.js
affineplane.plane2.scaleBy(plane, center, multiplier)
Create a plane that is scaled by the multiplier around a center point. For example, if a plane with basis vectors ex = (1,0), ey = (0,1) is scaled by 2, the basis vectors of the new plane are ex_hat = (2,0), ey_hat = (0,2).
Parameters:
- plane
- a plane2 on the reference plane
- center
- a point2 on the reference plane
- multiplier
- a number, the scaling factor
Returns:
- a plane2, a scaled plane
Source: scaleBy.js
affineplane.plane2.scaleTo(plane, center, scale)
Create a plane that has the given scale. This is achieved by scaling the plane around a center point so that afterwards the plane scale becomes the desired scale.
Parameters:
- plane
- a plane2 on the reference plane
- center
- a point2 on the reference plane
- scale
- a number, the desired scale
Returns:
- a plane2, a scaled plane
Source: scaleTo.js
affineplane.plane2.transform(plane, tr[, origin])
Transform the plane with a helmert transformation applied at origin.
Parameters:
- plane
- a plane2 on the reference basis
- tr
- a helm2 on the reference basis
- origin
- optional point2 on the reference basis. Default
{x:0,y:0}. The transformation will be applied to the plane at this point.
- optional point2 on the reference basis. Default
Returns:
- a plane2 on the reference plane
Source: transform.js
affineplane.plane2.transformInside(plane, tr[, origin])
Transform the plane with a Helmert transformation applied at the origin. Same as affineplane.plane2.transform except the transform and the origin are represented on the plane instead of the reference basis.
Parameters:
- plane
- a plane2 on the reference basis
- tr
- a helm2 on the plane
- origin
- optional point2 on the plane. Default
{x:0,y:0}. The transformation will be applied to the plane at this point.
- optional point2 on the plane. Default
Returns:
- a plane2 on the reference plane
Source: transformInside.js
affineplane.plane2.transitFrom(plane, source)
Transit a plane2 from the source plane to the reference plane. In other words, represent the plane in the coordinate system of the reference plane instead of the source plane.
Parameters:
- plane
- a plane2 on the source plane.
- source
- a plane2, the source plane, represented on the reference plane.
Returns:
- a plane2, represented on the reference plane.
Source: transitFrom.js
affineplane.plane2.transitTo
Transit a plane2 to a target plane. In other words, represent the plane2 in the coordinate system of the target plane.
Parameters:
- plane
- a plane2 on the reference plane.
- target
- a plane2, the target plane, represented on the reference plane.
Returns:
- a plane2, represented on the target plane.
Source: transitTo.js
affineplane.plane2.translateBy(plane, vec)
Translate the plane by a vector. Basically this moves the plane origin on the reference plane.
Parameters:
- plane
- a plane2 on the reference plane.
- vec
- a vec2, the translation vector. Represented on the reference plane.
Returns:
- a plane2 on the reference plane.
Source: translateBy.js
affineplane.plane2.translateTo(plane, p)
Move the plane origin to a new point. This translates the plane to a new position.
Parameters:
Returns:
- a plane2
Source: translateTo.js
affineplane.plane2.validate(plane)
Check if object is a valid plane2.
Parameters:
- plane
- an object
Returns:
- a boolean
Source: validate.js
affineplane.plane3
A plane3 does not model any possible plane in 3D space, but is limited to xy planes perpendicular to z-axis and with a known z position. Additionally, plane3 models orientation around z-axis and uniform scale in all three dimensions.
In other words, a plane is a helmert transform (helm3) from the plane coordinates to a reference coordinate system. Unlike helm3, the plane3 has position in the space. Therefore it can be projected perspectively.
The plane is represented with an object { a, b, x, y, z }
For example { a: 1, b: 0, x: 0, y: 0, z: 0 } is an exact
copy of its reference plane. For another example
{ a: 1, b: 0, x: 20, y: 0, z: 0 } is +20 units along x-axis
relative to its reference plane.
Contents:
- affineplane.plane3.IDENTITY
- affineplane.plane3.almostEqual
- affineplane.plane3.at
- affineplane.plane3.between
- affineplane.plane3.compose
- affineplane.plane3.copy
- affineplane.plane3.create
- affineplane.plane3.difference
- affineplane.plane3.equal
- affineplane.plane3.fromFeatures
- affineplane.plane3.fromHelmert
- affineplane.plane3.getNormal
- affineplane.plane3.getScale
- affineplane.plane3.invert
- affineplane.plane3.limitScale
- affineplane.plane3.orientation
- affineplane.plane3.projectByDepth
- affineplane.plane3.projectTo
- affineplane.plane3.projectToDepth
- affineplane.plane3.projectToPlane
- affineplane.plane3.projectToScale
- affineplane.plane3.rotateBy
- affineplane.plane3.rotateTo
- affineplane.plane3.rotateToOrtho
- affineplane.plane3.scaleBy
- affineplane.plane3.scaleTo
- affineplane.plane3.transform
- affineplane.plane3.transformBy
- affineplane.plane3.transformInside
- affineplane.plane3.transitFrom
- affineplane.plane3.transitTo
- affineplane.plane3.translateBy
- affineplane.plane3.translateTo
- affineplane.plane3.validate
Source: plane3/index.js
affineplane.plane3.almostEqual(pa, pb[, tolerance])
Test if two planes are almost equal.
Parameters:
- pa
- a plane3
- pb
- a plane3
- tolerance
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.plane3.at(plane, x, y, z)
Take a point relative to the plane and transit it to the reference basis.
Parameters:
- plane
- a plane3, in the reference basis.
- x
- a number, the horizontal coordinate on the plane
- y
- a number, the vertical coordinate on the plane
- z
- a number, the depth offset relative to the plane
Returns:
- a point3 in the reference basis.
Source: at.js
affineplane.plane3.between
Alias of affineplane.plane3.difference
affineplane.plane3.compose(planea, planeb)
Combine two planes together.
Parameters:
- planea
- a plane3 on the reference plane. This plane maps from plane A to the reference plane.
- planeb
- a plane3 on the planea. This plane maps from plane B to plane A.
Returns:
- a plane3 on the reference plane. This plane maps from plane B to the reference plane.
Source: compose.js
affineplane.plane3.copy(plane)
Clone the plane object.
Parameters:
- plane
- a plane3
Returns:
- a plane3
Source: copy.js
affineplane.plane3.create(origin, span)
Create a plane from 3D origin point and 2D basis vector.
Parameters:
- origin
- a point3, the position of the plane origin in the reference space.
- span
- a vec2, the basis vector for the x-axis. The basis for y-axis is always 90deg from x-axis, the direction determined by the right-hand rule where thumb is parallel with positive z-axis.
Returns:
- a plane3
Source: create.js
affineplane.plane3.difference(p, pp)
Find the difference between the two planes.
In other words, compute a transformation that would map the plane pp
to the plane p: T * pp = p <=> T = p * inv(pp)
To represent planes on each other, see affineplane.plane3.transitFrom and affineplane.plane3.transitTo.
Parameters:
Returns:
- a helm3, a transformation, in the reference basis.
Aliases: affineplane.plane3.between
Source: difference.js
affineplane.plane3.equal(p1, p2)
Test if two planes are strictly equal in their properties. See affineplane.plane3.almostEqual for a relaxed alternative.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.plane3.fromFeatures(feats)
Create a plane from human readable features.
Parameters:
- feats
- an object with optional props
- angle
- a number, angle in radians with respect to the reference plane.
- scale
- a number, scale multiplier with respect to the reference plane.
- origin
- a point3, the plane origin point in the reference space.
- angle
- an object with optional props
Returns:
- a plane3
Source: fromFeatures.js
affineplane.plane3.fromHelmert(tr, origin)
Create a plane by applying a transformation to an identity plane at the given transform origin. For example, you can create a plane that has been scaled about a point (100, 100, 100). The choice of transform origin does not affect scale or rotation of the created plane but does affect its translative component. Note that any rotation is performed around such a line that is parallel to z-axis and goes through the given origin point.
Parameters:
- tr
- a helm2z on the reference plane
- origin
- a point3 on the reference plane.
Returns:
- a plane3 on the reference plane
Source: fromHelmert.js
affineplane.plane3.getNormal(plane)
Get a unit vector perpendicular to the plane.
Parameters:
- plane
- a plane3 on the reference plane
Returns:
- a vec3, the plane normal vector.
Source: getNormal.js
affineplane.plane3.getScale(plane)
The length of the basis vector, the scale multiplier.
Parameters:
- plane
- a plane3 on the reference plane
Returns:
- a number, the scale multiplier with respect to the reference plane.
Source: getScale.js
affineplane.plane3.invert(plane)
Parameters:
- plane
- a plane3, represented on the reference plane.
Returns:
- a plane3, the reference plane represented on the given plane.
Source: invert.js
affineplane.plane3.limitScale(plane, min, max)
Limit the scale the plane transformation between min and max (inclusive).
Parameters:
- plane
- a plane3, in the reference basis.
- min
- a number, the minimum scale measured in the reference basis. Must be positive.
- max
- a number, the maximum scale measured in the reference basis. Must be positive.
Returns:
- a plane3
Source: limitScale.js
affineplane.plane3.orientation(plane)
The orientation of the plane, i.e. the rotation from default. If the plane is singular, falls back to the default orientation.
Parameters:
- plane
- a plane3, in the reference basis
Returns:
- a orient2, in the reference basis
Source: orientation.js
affineplane.plane3.projectByDepth(plane, origin, deltaDepth)
Project a plane so that it translates by the given delta depth from the origin. The plane is also scaled so that it would look similar from the origin point of view.
If the origin point is on the plane, not projection is made and the given plane is returned as-is.
Parameters:
- plane
- a plane3 in the reference basis.
- origin
- a point3 in the reference basis.
- deltaDepth
- a number, can be negative.
Returns:
- a plane3 in the reference basis.
Source: projectByDepth.js
affineplane.plane3.projectTo
Alias of affineplane.plane3.projectToPlane
affineplane.plane3.projectToDepth(plane, depth, camera)
Project the plane to the given depth so that it still looks the same to the camera. The plane is scaled and translated to match the appearance.
Parameters:
- plane
- a plane3 in the reference space.
- depth
- a number, the z coordinate in the reference space. The resulting plane will have this for its z coordinate.
- camera
- a point3 in the reference space.
Returns:
- a plane3 in the reference space.
Source: projectToDepth.js
affineplane.plane3.projectToPlane(plane, target[, camera])
Project the plane based on the image plane position and the optional camera position. If camera is given, project perspectively, otherwise orthogonally.
Parameters:
- plane
- a plane3 in the reference space.
- target
- a plane3 in the reference space. The image plane to which to project.
- camera
- optional point3 in the reference space.
Returns:
- a plane2 on the image plane.
Aliases: affineplane.plane3.projectTo
Source: projectToPlane.js
affineplane.plane3.projectToScale(plane, scale, camera)
Project the plane to the given scale so that it still looks the same to the camera. The plane is scaled and translated to match the appearance. Can be used to perspectively convert plane scale to translation.
Parameters:
- plane
- a plane3 in the reference space.
- scale
- a number, the desired scale, represented in the reference space.
- camera
- a point3 in the reference space.
Returns:
- a plane3 in the reference space
Source: projectToScale.js
affineplane.plane3.rotateBy(plane, center, radians)
Rotate the given plane in the reference space around a line parallel to z-axis and which goes through the given center point. The plane z depth is preserved.
Parameters:
- plane
- a plane3 in the reference space. The plane to rotate.
- center
- a point3, a point in the reference space. Defines the line around which to rotate.
- radians
- a number, angle in radians, direction x -> y.
Returns:
- a plane3 on the reference plane after rotation.
Source: rotateBy.js
affineplane.plane3.rotateTo(plane, center, radians)
Rotate the plane around a line parallel to z-axis and which goes though the given center point. After the rotation, the x-axis of the plane points to the given direction. The point where the line intersects the plane stays fixed during the operation.
Parameters:
- plane
- a plane3, the plane to rotate. Represented on the reference plane.
- center
- a point3, the point that defines the line around which to rotate. Represented on the reference plane.
- radians
- a number, angle to rotate to. Relative to the reference plane x-axis.
Returns:
- a plane3, the plane after rotation.
Source: rotateTo.js
affineplane.plane3.rotateToOrtho(plane, center)
Rotate plane to nearest orthogonal angle 0, 90, 180, and 270 deg with respect to the reference plane. The rotation happens on xy-plane, around the line parallel to z-axis and travelling through the given point.
Parameters:
- plane
- a plane3 to rotate.
- center
- a point3, a point in the reference space.
- Determines the rotation center.
Returns:
- a plane2
Note that if the plane is at the middle of two ortho angles, namely at 45, 135, 225, or 315 deg, then the nearest orthogonal angle is arbitrarily either the next or previous orthogonal angle due to the small variations caused by floating-point arithmetics.
Source: rotateToOrtho.js
affineplane.plane3.scaleBy(plane, center, multiplier)
Create a plane that is scaled by the multiplier around a center point. The center point is allowed to be off the plane. The scaling is performed about this center point.
For example, if a plane P with basis vectors ex = (1,0,0), ey = (0,1,0), ez = (0,1,0) is scaled by 2, the basis vectors of the new plane P_hat are ex_hat = (2,0,0), ey_hat = (0,2,0), ez_hat = (0,0,2) meaning that 3 units on P_hat are 6 units on P.
Parameters:
- plane
- a plane3 on the reference plane
- center
- a point3 on the reference plane
- multiplier
- a number, the scaling factor
Returns:
- a plane3, a scaled plane
Source: scaleBy.js
affineplane.plane3.scaleTo(plane, center, scale)
Scale a plane to the given scale towards the center point.
Parameters:
- plane
- a plane3 on the reference plane
- center
- a point3 on the reference plane
- scale
- a number, the desired scale
Returns:
- a plane3, a scaled plane
Source: scaleTo.js
affineplane.plane3.transform(plane, tr[, origin])
Transform the plane with a helmert transformation applied at origin.
Parameters:
- plane
- a plane3 on the reference basis
- tr
- origin
- optional point3 on the reference basis. Default
{x:0,y:0,z:0}. The transformation will be applied to the plane at this point.
- optional point3 on the reference basis. Default
Returns:
- a plane3 on the reference basis
Aliases: affineplane.plane3.transformBy
Source: transform.js
affineplane.plane3.transformBy
Alias of affineplane.plane3.transform
affineplane.plane3.transformInside(plane, tr[, origin])
Transform the plane with a Helmert transformation applied at the origin. Same as affineplane.plane3.transform except the transform and the origin are represented on the plane instead of the reference basis.
Parameters:
- plane
- a plane3 on the reference basis
- tr
- a helm3 on the plane
- origin
- optional point3 on the plane. Default
{x:0,y:0,z:0}. The transformation will be applied to the plane at this point.
- optional point3 on the plane. Default
Returns:
- a plane3 on the reference plane
Source: transformInside.js
affineplane.plane3.transitFrom(plane, source)
Transit a plane3 from the source plane to the reference plane. In other words, represent the same plane in the coordinate system of the reference plane.
Parameters:
- plane
- a plane3, represented on the source plane.
- source
- a plane3, the source plane, represented on the reference plane.
Returns:
- a plane3, represented on the reference plane.
Source: transitFrom.js
affineplane.plane3.transitTo(plane, target)
Transit a plane3 to a target plane. In other words, represent the plane3 in the coordinate system of the target plane.
Parameters:
- plane
- a plane3, represented on the reference plane.
- target
- a plane3, the target plane, represented on the reference plane.
Returns:
- a plane3, represented on the target plane.
Source: transitTo.js
affineplane.plane3.translateBy(plane, vec)
Translate the plane by a vector. Basically this moves the plane origin on the reference plane by the given vector.
Parameters:
Returns:
- a plane3 in the reference space.
Source: translateBy.js
affineplane.plane3.translateTo(plane, p)
Source: translateTo.js
affineplane.plane3.validate(plane)
Check if object is a valid plane3.
Parameters:
- plane
- an object
Returns:
- a boolean
Source: validate.js
affineplane.point2
A two-dimensional point. A point is a position in affine space.
Due to affinity, two points cannot be added together,
although the distance between and their mean can be computed.
An affine space does not have origin; { x:0, y:0 } is not an origin.
Contents:
- affineplane.point2.ZERO
- affineplane.point2.almostEqual
- affineplane.point2.average
- affineplane.point2.copy
- affineplane.point2.create
- affineplane.point2.delta
- affineplane.point2.diff
- affineplane.point2.difference
- affineplane.point2.direction
- affineplane.point2.distance
- affineplane.point2.equal
- affineplane.point2.equals
- affineplane.point2.fromArray
- affineplane.point2.homothety
- affineplane.point2.mean
- affineplane.point2.move
- affineplane.point2.offset
- affineplane.point2.polarOffset
- affineplane.point2.projectByDistance
- affineplane.point2.projectTo
- affineplane.point2.projectToLine
- affineplane.point2.projectToPlane
- affineplane.point2.rotateBy
- affineplane.point2.toArray
- affineplane.point2.transform
- affineplane.point2.transformMany
- affineplane.point2.transitFrom
- affineplane.point2.transitTo
- affineplane.point2.translate
- affineplane.point2.validate
- affineplane.point2.vectorTo
Source: point2/index.js
affineplane.point2.ZERO
The zero point
Source: point2/index.js
affineplane.point2.almostEqual(p, q[, epsilon])
Test if points are almost equal by the margin of epsilon.
Parameters:
- p
- a point2
- q
- a point2
- epsilon
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.point2.average(ps)
Average of points.
Parameters:
- ps
- array of point2
Returns:
- a point2
Aliases: affineplane.point2.mean
Source: average.js
affineplane.point2.copy(p)
Copy point object.
Parameters:
- p
- a point2
Returns:
- a point2
Source: copy.js
affineplane.point2.create(x, y)
Create a point2 object: { x, y }.
Parameters:
- x
- a number. The x coordinate.
- y
- a number. The y coordinate.
Returns:
- a point2
Source: create.js
affineplane.point2.delta
Alias of affineplane.point2.difference
affineplane.point2.diff
Alias of affineplane.point2.difference
affineplane.point2.difference(p, q)
A vector from point p to point q.
Parameters:
Returns:
- a vec2
Aliases: affineplane.point2.diff, affineplane.point2.delta, affineplane.point2.vectorTo
Source: difference.js
affineplane.point2.direction(p, q)
Get direction from point to point.
Parameters:
Returns:
- a dir2, a unit vector. If no direction can be computed, for example in the case where the points are equal, then the direction will be
{ x: 1, y: 0 }
Source: direction.js
affineplane.point2.distance(p, q)
Distance between two points.
Parameters:
Returns:
- a number, a distance from p to q (= distance from q to p)
Source: distance.js
affineplane.point2.equal(p, q)
Test if points p, q are equal.
Parameters:
Returns:
- a boolean
Aliases: affineplane.point2.equals
Source: equal.js
affineplane.point2.equals
Alias of affineplane.point2.equal
affineplane.point2.fromArray(arrp)
Create { x, y } point from array [x, y].
Parameters:
- arrp
- a two-element array
Returns:
- a point2
Source: fromArray.js
affineplane.point2.homothety(point, origin, ratio)
Perform homothety about the origin point.
Parameters:
Returns:
- a point2
Source: homothety.js
affineplane.point2.mean
Alias of affineplane.point2.average
affineplane.point2.move
Alias of affineplane.point2.translate
affineplane.point2.offset(p, dx, dy)
Offset a point by scalars dx dy.
Parameters:
- p
- a point2
- dx
- a number, an offset along x-axis.
- dy
- a number, an offset along y-axis.
Returns:
- a point2, translated by the vector
{ x: dx, y: dy }
Source: offset.js
affineplane.point2.polarOffset(p, distance, angle)
Create a point away from p at the given distance and angle.
Parameters:
- p
- a point2
- distance
- a number, the distance from p.
- angle
- a number, the angle in radians
Returns:
- a point2
Source: polarOffset.js
affineplane.point2.projectByDistance(point, origin, distance)
Perform homothety about the origin point so that the point translates by the given distance. If the point and origin are the same point, no translation will occur and the original point is returned.
Parameters:
Returns:
- a point2
Source: projectByDistance.js
affineplane.point2.projectTo
Alias of affineplane.point2.projectToPlane
affineplane.point2.projectToLine(p, line)
Project a point orthogonally onto a line.
Parameters:
Returns:
- a point2
Source: projectToLine.js
affineplane.point2.projectToPlane(point, plane[, camera])
Project a point onto another plane in 3d. If camera is given, project perspectively. Otherwise, project orthogonally.
Parameters:
- point
- a point2 in the reference space, assume z=0.
- plane
- a plane3 in the reference space.
- camera
- optional point3 in the reference space.
Returns:
- a point2 on the target plane.
Aliases: affineplane.point2.projectTo
Source: projectToPlane.js
affineplane.point2.rotateBy(p, origin, radians)
Rotate point about the given center.
Parameters:
Returns:
- a point2
Source: rotateBy.js
affineplane.point2.toArray(p)
Get the point2 object as an array.
Parameters:
- p
- a point2
Returns:
- an array
[x, y]
Source: toArray.js
affineplane.point2.transform(p, tr)
Transform a point.
Parameters:
Returns:
- a point2, the transformed point
Source: transform.js
affineplane.point2.transformMany(ps, tr)
Transform an array of points.
Parameters:
Returns:
- an array of point2, each point transformed by tr.
Source: transformMany.js
affineplane.point2.transitFrom(point, source)
Transit a point2 from the source plane to the reference plane.
Parameters:
- point
- a point2 on the source plane.
- source
- a plane2, the source plane, represented on the reference plane.
Returns:
- a point2, represented on the reference plane.
Source: transitFrom.js
affineplane.point2.transitTo(point, target)
Transit a point2 to a target plane. In other words, represent the point2 in the coordinate system of the plane.
Parameters:
- point
- a point2 on the reference plane.
- target
- a plane2, the target plane, represented on the reference plane.
Returns:
- a point2, represented on the target plane.
Source: transitTo.js
affineplane.point2.translate(p, vec)
Translate the point by the given vector. See affineplane.point2.offset to translate by scalars.
Parameters:
Returns:
- a point2
Aliases: affineplane.point2.move
Source: translate.js
affineplane.point2.validate(p)
Check if the object is a valid point2. Valid point2 has x and y properties that are valid numbers.
Parameters:
- p
- an object
Returns:
- a boolean, true if valid point2
Source: validate.js
affineplane.point2.vectorTo
Alias of affineplane.point2.difference
affineplane.point3
Three-dimensional point { x, y, z }. Unlike vectors, points model locations in space and therefore are affected by scale, orientation, and translation of the plane on which they are represented.
Contents:
- affineplane.point3.ZERO
- affineplane.point3.almostEqual
- affineplane.point3.average
- affineplane.point3.copy
- affineplane.point3.create
- affineplane.point3.delta
- affineplane.point3.diff
- affineplane.point3.difference
- affineplane.point3.direction
- affineplane.point3.distance
- affineplane.point3.distanceToLine
- affineplane.point3.distanceToPlane
- affineplane.point3.distanceToRay
- affineplane.point3.equal
- affineplane.point3.equals
- affineplane.point3.fromArray
- affineplane.point3.homothety
- affineplane.point3.mean
- affineplane.point3.offset
- affineplane.point3.polarOffset
- affineplane.point3.projectByDistance
- affineplane.point3.projectTo
- affineplane.point3.projectToPlane
- affineplane.point3.rotateAroundLine
- affineplane.point3.rotateBy
- affineplane.point3.round
- affineplane.point3.toArray
- affineplane.point3.transitFrom
- affineplane.point3.transitTo
- affineplane.point3.translate
- affineplane.point3.translateBy
- affineplane.point3.validate
- affineplane.point3.vectorTo
Source: point3/index.js
affineplane.point3.ZERO
The zero point
Source: point3/index.js
affineplane.point3.almostEqual(p, q[, epsilon])
Test if points are almost equal by the margin of epsilon.
Parameters:
- p
- a point3
- q
- a point3
- epsilon
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.point3.average(ps)
Average of points.
Parameters:
- ps
- array of point3
Returns:
- a point3
Aliases: affineplane.point3.mean
Source: average.js
affineplane.point3.copy(p)
Clone point3 to a new object.
Returns:
- a point3
Source: copy.js
affineplane.point3.create(x, y, z)
Create a three-dimensional point {x, y, z}.
Returns:
- a point3
Source: create.js
affineplane.point3.delta
Alias of affineplane.point3.difference
affineplane.point3.diff
Alias of affineplane.point3.difference
affineplane.point3.difference(p, q)
A vector from point p to point q.
Parameters:
Returns:
- a vec3
Aliases: affineplane.point3.diff, affineplane.point3.delta, affineplane.point3.vectorTo
Source: difference.js
affineplane.point3.direction(p, q)
Get direction from point to point.
Parameters:
Returns:
- a dir3, a unit vector. If no direction can be computed, for example in the case where the points are equal, then the direction will be
{ x: 1, y: 0, z: 0 }
Source: direction.js
affineplane.point3.distance(p, q)
Euclidean distance between two points.
Parameters:
Returns:
- a number, a distance from p to q (= distance from q to p)
Source: distance.js
affineplane.point3.distanceToLine(p, line)
Compute the smallest euclidean distance between a point and a line. See also affineplane.point3.distanceToRay.
Parameters:
Returns:
Source: distanceToLine.js
affineplane.point3.distanceToPlane(p, plane)
Euclidean distance between point and plane.
Parameters:
Returns:
Source: distanceToPlane.js
affineplane.point3.distanceToRay(p, ray)
Compute the smallest euclidean distance between a point and a ray. For half of the space, the closest point on the ray is the ray origin and therefore, for points inside that half, the computation reduces to the euclidean distance to the ray origin. See also affineplane.point3.distanceToLine.
Parameters:
Returns:
Source: distanceToRay.js
affineplane.point3.equal(p, q)
Test if points p, q are equal in value.
Parameters:
Returns:
- a boolean, true if equal
Aliases: affineplane.point3.equals
Source: equal.js
affineplane.point3.equals
Alias of affineplane.point3.equal
affineplane.point3.fromArray(arrp)
Create a point3 from array [x, y, z].
Parameters:
- arrp
- a three-element array
Returns:
- a point3
Source: fromArray.js
affineplane.point3.homothety(point, origin, ratio)
Perform a homothety about the origin point.
Parameters:
Returns:
- a point3
Source: homothety.js
affineplane.point3.mean
Alias of affineplane.point3.average
affineplane.point3.offset(p, dx, dy, dz)
Offset a point by scalars dx, dy, dz.
Parameters:
- p
- a point3
- dx
- a number, the offset along x-axis
- dy
- a number, the offset along y-axis
- dz
- a number, the offset along z-axis
Returns:
- a point3, translated by the vector
{ x: dx, y: dy, z: dz }
Source: offset.js
affineplane.point3.polarOffset(p, distance, roll, pitch)
Create a point near p at the given distance, roll angle, and pitch angle.
Parameters:
- p
- a point3
- distance
- a number, the distance from p.
- roll
- a number, the roll angle in radians. Clockwise rotation, the right-hand rule for z-axis.
- pitch
- optional number, default 0. The pitch angle in radians. The right-hand rule for x-axis.
Returns:
- a point3
Source: polarOffset.js
affineplane.point3.projectByDistance(point, origin, distance)
Perform homothety about the origin point so that the point translates by the given distance. If the point and origin are the same point, no translation will occur and the original point is returned.
Parameters:
Returns:
- a point3
Source: projectByDistance.js
affineplane.point3.projectTo
Alias of affineplane.point3.projectToPlane
affineplane.point3.projectToPlane(point, plane[, camera])
Project a 3D point onto a plane in 3D space.
Parameters:
- point
- a point3 in the reference space.
- plane
- a plane3 in the reference space. The target plane.
- camera
- optional point3 in the reference space. The camera position.
Returns:
- a point2 on the target plane.
Aliases: affineplane.point3.projectTo
Source: projectToPlane.js
affineplane.point3.rotateAroundLine(p, line, rads)
Rotate a point around the axis line by the given radians.
Parameters:
Returns:
- a point3, the rotated point
Source: rotateAroundLine.js
affineplane.point3.rotateBy(p, origin, roll[, pitch])
Rotate point around the given center point. Roll is applied before pitch.
Parameters:
- p
- a point3
- origin
- a point3, the point around to rotate
- roll
- a number, roll angle in radians. Right-hand rotation around z-axis.
- pitch
- optional number, pitch angle in radians. Default 0. Right-hand rotation around x-axis.
Returns:
- a point3
Source: rotateBy.js
affineplane.point3.round(p)
Move point to the closest integer coordinate.
Parameters:
- p
- a point3
Returns:
- a point3, having integer coordinates.
Source: round.js
affineplane.point3.toArray(p)
Get the point3 object as an array. Compatible with affineplane.point3.fromArray.
Parameters:
- p
- a point3
Returns:
- an array
[x, y, z]
Source: toArray.js
affineplane.point3.transitFrom(point, plane)
Represent the point on the reference plane without losing information.
Parameters:
Returns:
- a point3, represented on the reference plane.
Source: transitFrom.js
affineplane.point3.transitTo(point, plane)
Represent the point on the target plane without losing information.
Parameters:
Returns:
- a point3, represented on the target plane.
Source: transitTo.js
affineplane.point3.translate(p, vec)
Translate the point by the given vector.
Parameters:
Returns:
- a point3
Aliases: affineplane.point3.translateBy
Source: translate.js
affineplane.point3.translateBy
Alias of affineplane.point3.translate
affineplane.point3.validate(p)
Check if the object is a valid point3. Valid point3 has props x, y and z that are valid numbers.
Parameters:
- p
- an object
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.point3.vectorTo
Alias of affineplane.point3.difference
affineplane.poly2
A two-dimensional polygon; Array of point2;
A closed sequence of points [{ x, y }, { x, y }, ...].
Contents:
Source: poly2/index.js
affineplane.poly2.create(points)
Create a polygon on plane. Deep-clones the points array.
Parameters:
- points
- array of point2
Returns:
- a poly2, array of points
Source: create.js
affineplane.quat4
A quaternion { a, b, c, d }
Contents:
- affineplane.quat4.add
- affineplane.quat4.conjugate
- affineplane.quat4.create
- affineplane.quat4.diff
- affineplane.quat4.difference
- affineplane.quat4.fromDirectionAndAngle
- affineplane.quat4.fromVector
- affineplane.quat4.hamilton
- affineplane.quat4.multiply
- affineplane.quat4.norm
- affineplane.quat4.rotateVector
Source: quat4/index.js
affineplane.quat4.add(q, p)
Add two quaternions together via component-wise addition.
Parameters:
Returns:
- a quat4
Source: add.js
affineplane.quat4.conjugate(q)
Get the conjugate of a quaternion.
Parameters:
- q
- a quat4
Returns:
- a quat4
Source: conjugate.js
affineplane.quat4.create(a, b, c, d)
Parameters:
- a
- a number
- b
- a number
- c
- a number
- d
- a number
Returns:
- a quat4
Source: create.js
affineplane.quat4.diff
Alias of affineplane.quat4.difference
affineplane.quat4.difference(q, p)
Get the quaternion q - p.
Parameters:
Returns:
- a quat4
Aliases: affineplane.quat4.diff
Source: difference.js
affineplane.quat4.fromDirectionAndAngle(dir, angle)
Construct a unit quaternion from an axis vector and a rotation angle around that direction. Note that if this quaternion is later used to rotate a 3D vector, the rotation angle will be applied twice to map the vector back to 3D.
Parameters:
Returns:
- a quat4
Source: fromAxisAngle.js
affineplane.quat4.fromVector(vec)
Construct a vector quaternion i.e. a quaternion with zero scalar part.
Parameters:
- vec
- a vec3
Returns:
- a quat4
Source: fromVector.js
affineplane.quat4.hamilton(q, p)
The Hamilton product of two quaternions.
Parameters:
Returns:
- a quat4
Aliases: affineplane.quat4.multiply
Source: hamilton.js
affineplane.quat4.multiply
Alias of affineplane.quat4.hamilton
affineplane.quat4.norm(q)
The length of quaternion. Also called the norm.
Parameters:
- q
- a quat4
Returns:
- a number
Source: norm.js
affineplane.quat4.rotateVector(quat, vec)
Apply quaternion to rotate a vector. Note that the quaternion must rotate the vector twice to return it back to the 3D space. Therefore, if the quaternion was created using an angle like π/2, the vector will be rotated twice that amount, π.
Parameters:
Returns:
- a vec3, the rotated vector.
Source: rotateVector.js
affineplane.ray3
Ray is like a line but extends into one direction only from the origin.
We represent ray with object { x, y, z, dx, dy, dz }
Contents:
- affineplane.ray3.DEFAULT
- affineplane.ray3.ZERO
- affineplane.ray3.almostEqual
- affineplane.ray3.at
- affineplane.ray3.copy
- affineplane.ray3.create
- affineplane.ray3.equal
- affineplane.ray3.getOrigin
- affineplane.ray3.getVector
- affineplane.ray3.homothety
- affineplane.ray3.invert
- affineplane.ray3.negate
- affineplane.ray3.offset
- affineplane.ray3.transitFrom
- affineplane.ray3.transitTo
- affineplane.ray3.validate
Source: ray3/index.js
affineplane.ray3.DEFAULT
Default ray that has origin at zero and unit span along positive x-axis.
Source: ray3/index.js
affineplane.ray3.ZERO
Invalid ray with origin at zero and zero spanning vector.
Source: ray3/index.js
affineplane.ray3.almostEqual(r, rr[, epsilon])
Test if rays are almost equal by the margin of epsilon.
Parameters:
- r
- a ray3
- rr
- a ray3
- epsilon
- Optional number, default to affineplane.epsilon.
- Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.ray3.at(line, c)
Get a point on the ray at position c from the ray origin. For example, c=2 gives a point two ray spans away from the origin. Negative positions default to the ray origin.
Parameters:
- ray
- a ray3
- c
- a number
Returns:
- a point3
Source: at.js
affineplane.ray3.copy(r)
Copy ray object.
Parameters:
- r
- a ray3
Returns:
- a ray3
Source: copy.js
affineplane.ray3.create(origin, span)
Create a ray object from origin point and a spanning vector.
Parameters:
- origin
- a point3, the ray starting point.
- span
Returns:
- a ray3
Source: create.js
affineplane.ray3.equal(r, rr)
Test if rays are strictly equal in position and direction.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.ray3.getOrigin(r)
Get the origin point of the ray. Note that you can also use the ray object itself as a point.
Parameters:
- r
- a ray3
Returns:
- a point3
Source: getOrigin.js
affineplane.ray3.getVector(r)
Get the spanning vector of the ray.
Parameters:
- r
- a ray3
Returns:
- a vec3
Source: getVector.js
affineplane.ray3.homothety(ray, origin, ratio)
Perform a homothety about the origin for the ray.
Parameters:
Returns:
- a ray3
Source: homothety.js
affineplane.ray3.invert(r)
Get a ray with the same magnitude but to opposite direction.
Parameters:
- r
- a ray3
Returns:
- a ray3
Aliases: affineplane.ray3.negate
Source: invert.js
affineplane.ray3.negate
Alias of affineplane.ray3.invert
affineplane.ray3.offset(ray, dx, dy, dz)
Offset a ray origin by scalars dx, dy, dz.
Parameters:
- ray
- a ray3
- dx
- a number, the offset along x-axis
- dy
- a number, the offset along y-axis
- dz
- a number, the offset along z-axis
Returns:
- a ray3
Source: offset.js
affineplane.ray3.transitFrom(ray, basis)
Represent the ray in the reference basis without losing information.
Parameters:
Returns:
- a ray3, represented in the reference basis.
Source: transitFrom.js
affineplane.ray3.transitTo(ray, basis)
Represent the ray in another basis without losing information.
Parameters:
Returns:
- a ray3, represented in the given basis.
Source: transitTo.js
affineplane.ray3.validate(r)
Check if object is a valid ray3. Valid ray has numeric properties x, y, z, dx, dy, dz and has non-zero spanning vector.
Parameters:
- r
- an object
Returns:
- a boolean
Source: validate.js
affineplane.rect2
DEPRECATED in v2.10. Will be removed in v3.0. Use box2 instead.
Rectangle on a two-dimensional plane. A rectangle is an object
{ basis: { a, b, x, y }, size: { w, h } }, where the basis
is a transformation from rectangle’s inner coordinate system
to the reference coordinate system.
Contents:
- affineplane.rect2.at
- affineplane.rect2.atNorm
- affineplane.rect2.getArea
- affineplane.rect2.getArea
- affineplane.rect2.getBounds
- affineplane.rect2.getBounds
- affineplane.rect2.transitFrom
- affineplane.rect2.transitTo
Source: rect2/index.js
affineplane.rect2.at(rect, rx, ry)
Take a point on the rect, represented on the rects outer basis.
Parameters:
- rect
- a rect2
- rx
- horizontal distance from the top-left corner of the rectangle represented on the rects inner basis
- ry
- vertical distance from the top-left corner of the rectangle represented on the rects inner basis
Returns:
- a point2 on the outer basis
Source: at.js
affineplane.rect2.atNorm(rect, nw, nh)
Take a point on the rect.
Parameters:
- rect
- a rectangle
- nw
- a number, a normalized coordinate along width 0..1
- nh
- a number, a normalized coordinate along height 0..1
Returns:
- a point on the rectangle’s outer basis
Source: atNorm.js
affineplane.rect2.getArea(rect)
Compute rectangle area. This returns the area on the reference basis.
Parameters:
- rect
- a rect2, on the reference basis.
Returns:
- a number, the area on the reference basis.
Source: getArea.js
affineplane.rect2.getArea(rect)
Compute rectangle area. This returns the area on the reference basis.
Parameters:
- rect
- a rect2, on the reference basis.
Returns:
- a number, the area on the reference basis.
Source: getArea.js
affineplane.rect2.getBounds(rect)
Get outer bounds of the given rect. In other words, return a rectangle with no rotation and no dilation with respect to the reference basis but has translation and size so that it covers the given rectangle.
Parameters:
- rect
- a rect2, on the reference basis.
Returns:
- a rect2, on the reference basis.
Source: getBounds.js
affineplane.rect2.getBounds(rect)
Get outer bounds of the given rect. In other words, return a rectangle with no rotation and no dilation with respect to the reference basis but has translation and size so that it covers the given rectangle.
Parameters:
- rect
- a rect2, on the reference basis.
Returns:
- a rect2, on the reference basis.
Source: getBounds.js
affineplane.rect2.transitFrom(rect, source)
Convert a rectangle from source basis to the reference basis.
Parameters:
- rect
- a rect2, a rectangle on the source basis.
- source
- a plane2, the source basis represented on the reference basis.
Returns:
- a rect2, represented on the reference basis.
Source: transitFrom.js
affineplane.rect2.transitTo(rect, target)
Convert a rectangle from the reference basis to the target basis.
Parameters:
- rect
- a rectangle on the reference basis.
- target
- a plane2, the target basis represented on the reference basis.
Returns:
- a rect2, represented on the target basis.
Source: transitTo.js
affineplane.rect3
DEPRECATED in v2.10. Will be removed in v3.0. Use box3 instead.
A rectangle, floating in three dimensions. A rect3 is an object
{ basis: { a, b, x, y, z }, size: { w, h } }, where the basis
is a helm3 - a Helmert transformation from rectangle’s inner coordinate
system to the reference coordinate system.
Contents:
- affineplane.rect3.at
- affineplane.rect3.atNorm
- affineplane.rect3.create
- affineplane.rect3.transitFrom
- affineplane.rect3.transitTo
Source: rect3/index.js
affineplane.rect3.at(rect, rx, ry)
Take a point on the rect, represented on the rects outer basis.
Parameters:
- rect
- a rect2
- rx
- horizontal distance from the top-left corner of the rectangle represented on the rects inner basis
- ry
- vertical distance from the top-left corner of the rectangle represented on the rects inner basis
Returns:
- a point3, represented on the outer basis.
Source: at.js
affineplane.rect3.atNorm(rect, nw, nh)
Take a point on the rect.
Parameters:
- rect
- a rectangle
- nw
- a number, a normalized coordinate along width 0..1
- nh
- a number, a normalized coordinate along height 0..1
Returns:
- a point3, in the rectangle’s outer basis
Source: atNorm.js
affineplane.rect3.create(basis, size)
Construct a rect3 object from basis and size.
Parameters:
Returns:
- a rect3
Source: create.js
affineplane.rect3.transitFrom(rect, source)
Convert a rectangle from source basis to the reference basis.
Parameters:
- rect
- a rect3, a rectangle on the source basis.
- source
- a basis3, the source basis represented on the reference basis.
Returns:
- a rect3, represented on the reference basis.
Source: transitFrom.js
affineplane.rect3.transitTo(rect, target)
Convert a rectangle from the reference basis to the target basis.
Parameters:
- rect
- a rectangle on the reference basis.
- target
- a basis3, the target basis represented on the reference basis.
Returns:
- a rect3, represented on the target basis.
Source: transitTo.js
affineplane.rot2
Rotation in 2D. Represented by object { a, b }.
Rotation differs from orientation in the manner that where orientation is a static rotational position of an object, rotation is dynamic transform of an object. Therefore a change of basis does not affect rotation but it does affect orientation.
Contents:
Source: rot2/index.js
affineplane.rot2.create(a, b)
Parameters:
- a
- a number
- b
- a number
Returns:
- a rot2
Source: create.js
affineplane.rot2.validate(r)
Check if the object is a valid rot2. Valid object has properties a and b which represent valid rotation matrix.
Parameters:
- r
- an object
Returns:
- a boolean
Source: validate.js
affineplane.scalar1
The scalar is a directionless, one-dimensional number. Suitable for lengths and scales that undergo basis transitions. If transited between bases, only a change in the coordinate scale affects the number representation of the scalar. Rotation or translation of the basis does not affect the scalar nor the representation.
Contents:
- affineplane.scalar1.almostEqual
- affineplane.scalar1.create
- affineplane.scalar1.equal
- affineplane.scalar1.projectToPlane
- affineplane.scalar1.transitFrom
- affineplane.scalar1.transitTo
- affineplane.scalar1.validate
Source: scalar1/index.js
affineplane.scalar1.almostEqual(c, d[, tolerance])
Test if scalars c, d are almost equal within the margin of tolerance.
Parameters:
- c
- a number, a scalar1
- d
- a number, a scalar1
- tolerance
- optional number, default is affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.scalar1.create(d)
Create a valid scalar. Basically it is just the number itself.
Parameters:
- d
- a number
Returns:
- a number, the scalar.
Throws:
- if the argument is not a number or is NaN
Source: create.js
affineplane.scalar1.equal(c, d)
Test if scalars c, d are strictly equal.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.scalar1.projectToPlane(scalar, plane[, camera])
Project a scalar (e.g. distance) onto another plane in 3d. If camera is given, project perspectively. Otherwise, project orthogonally.
Parameters:
- scalar
- a scalar1 on the z=0 plane of the reference space.
- plane
- a plane3 relative to the reference space.
- camera
- optional point3 in the reference space.
Returns:
- a scalar1, projected on the target plane, and represented in the scale of the target.
Source: projectToPlane.js
affineplane.scalar1.transitFrom(scalar, source)
Transit a scalar from the source basis to the reference basis.
Parameters:
- scalar
- a number, a scalar1 in the source basis.
- source
Returns:
- a number, the same scalar1 but represented in the reference basis.
Source: transitFrom.js
affineplane.scalar1.transitTo(scalar, target)
Transit a scalar to another basis. In other words, represent the scalar in the coordinate system of the target.
Parameters:
- scalar
- a number, a scalar1 in the reference basis.
- target
Returns:
- a number, a scalar1 in the target basis.
Source: transitTo.js
affineplane.scalar1.validate(s)
Check if the argument is a valid scalar1. Valid scalar1 is a number and not NaN.
Parameters:
- s
- a value
Returns:
- a boolean, true if valid scalar1
Source: validate.js
affineplane.scalar2
The scalar2 is a directionless measure of order 2. It is suitable for area measurements that undergo basis transitions.
For example, let us have 1x1 square on a basis of scale 1. Area of the square is 1 unit. If we transit the square to a basis of scale 2, the square dimensions half to 0.5x0.5 and the area becomes, not half, but one fourth.
For another example, consider a map in scale 1:100. On the map, an area of 1 squaremeter of ground is represented by 1 squarecentimeter of paper, thus 1:10000 of the original area.
Contents:
- affineplane.scalar2.almostEqual
- affineplane.scalar2.create
- affineplane.scalar2.equal
- affineplane.scalar2.projectToPlane
- affineplane.scalar2.transitFrom
- affineplane.scalar2.transitTo
- affineplane.scalar2.validate
Source: scalar2/index.js
affineplane.scalar2.almostEqual(c, d[, tolerance])
Test if the second order scalars c, d are almost equal within the margin of tolerance.
Parameters:
- c
- a number, a scalar2
- d
- a number, a scalar2
- tolerance
- optional number, default is affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.scalar2.create(d)
Create a valid scalar. Basically it is just the number itself.
Parameters:
- d
- a number
Returns:
- a number, the scalar.
Throws:
- if the argument is not a number or is NaN
Source: create.js
affineplane.scalar2.equal(c, d)
Test if scalars c, d are strictly equal.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.scalar2.projectToPlane(scalar, plane[, camera])
Project a second-order scalar (e.g. area) onto another plane in 3D. If camera is given, project perspectively. Otherwise, project orthogonally.
Parameters:
- scalar
- a scalar2 on the z=0 plane of the reference space.
- plane
- a plane3 relative to the reference space.
- camera
- optional point3 in the reference space.
Returns:
- a scalar2, projected on the target plane, and represented in the scale of the target.
Source: projectToPlane.js
affineplane.scalar2.transitFrom(scalar, source)
Transit an area measure from the source basis to the reference basis.
Parameters:
- scalar
- a number, a scalar2 in the source basis.
- source
Returns:
- a number, the same scalar2 but represented in the reference basis.
Source: transitFrom.js
affineplane.scalar2.transitTo(scalar, target)
Transit an area measurement to another basis. In other words, represent a second order scalar in the coordinate system of the target.
Parameters:
- scalar
- a number, a scalar2 in the reference basis.
- target
Returns:
- a number, a scalar2 in the target basis.
Source: transitTo.js
affineplane.scalar2.validate(s)
Check if the argument is a valid scalar2. Valid scalar2 is a number and not NaN.
Parameters:
- s
- a value
Returns:
- a boolean, true if valid scalar2
Source: validate.js
affineplane.scalar3
The scalar3 is a directionless measure of order 3. It is suitable for volume measurements that undergo basis transitions.
For example, let us have 1x1x1 box in a basis of scale 1. The volume of the box is 1 unit. If we transit the box into a basis of scale 2, the box dimensions half to 0.5x0.5x0.5 and the volume becomes, not half, but one eight.
For another example, consider a miniature building in scale 1:100. In the miniature, the volume of 1 cubic meter is represented by 1 cubic centimeter, thus 1:1000000 of the original volume.
Contents:
- affineplane.scalar3.almostEqual
- affineplane.scalar3.create
- affineplane.scalar3.equal
- affineplane.scalar3.transitFrom
- affineplane.scalar3.transitTo
- affineplane.scalar3.validate
Source: scalar3/index.js
affineplane.scalar3.almostEqual(c, d[, tolerance])
Test if the third-order scalars c, d are almost equal within the margin of tolerance.
Parameters:
- c
- a number, a scalar3
- d
- a number, a scalar3
- tolerance
- optional number, default is affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.scalar3.create(d)
Create a valid third-order scalar. Basically it is just the number itself.
Parameters:
- d
- a number
Returns:
- a number, the scalar.
Throws:
- if the argument is not a number or is NaN
Source: create.js
affineplane.scalar3.equal(c, d)
Test if the third-order scalars c, d are strictly equal.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.scalar3.transitFrom(scalar, source)
Transit a volume measure from the source basis to the reference basis.
Parameters:
- scalar
- a number, a scalar3 in the source basis.
- source
Returns:
- a number, the same scalar2 but represented in the reference basis.
Source: transitFrom.js
affineplane.scalar3.transitTo(scalar, target)
Transit a volume measurement to another basis. In other words, represent a third-order scalar in the coordinate system of the target.
Parameters:
- scalar
- a number, a scalar3 in the reference basis.
- target
Returns:
- a number, a scalar3 in the target basis.
Source: transitTo.js
affineplane.scalar3.validate(s)
Check if the argument is a valid scalar3. Valid scalar3 is a number and not NaN.
Parameters:
- s
- a value
Returns:
- a boolean, true if valid scalar3
Source: validate.js
affineplane.segment2
Two-dimensional line segment. Represented by the segment start and end points in an array of length two.
Example: [{ x: 0, y: 0 }, { x: 1, y: 2 }]
Contents:
- affineplane.segment2.collide
- affineplane.segment2.create
- affineplane.segment2.transitFrom
- affineplane.segment2.transitTo
- affineplane.segment2.validate
Source: segment2/index.js
affineplane.segment2.collide(s0, s1)
Test if two segments collide.
Parameters:
Returns:
- a boolean, true if segments collide.
Source: collide.js
affineplane.segment2.create(p0, p1)
Create a segment from points.
Parameters:
Returns:
- a segment2, an array.
Source: create.js
affineplane.segment2.transitFrom(seg, source)
Represent a segment on the reference basis. In other words, transit the segment from the source basis to the reference basis.
Parameters:
- seg
- a segment2, represented on the source basis.
- source
- a plane2, the source basis, represented on the reference basis.
Returns:
- a segment2, represented on the reference basis.
Source: transitFrom.js
affineplane.segment2.transitTo(seg, target)
Represent a segment in the target basis. In other words, transit the segment from the reference basis to the target basis.
Parameters:
- seg
- a segment2, represented on the reference basis.
- target
- a plane2, the target basis, represented on the reference basis.
Returns:
- a segment2, represented in the target basis.
Source: transitTo.js
affineplane.segment2.validate(seg)
Check if the object is a valid segment2. A valid segment2 is an array of two valid point2 objects.
Parameters:
- seg
- an object
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.segment3
Three-dimensional line segment. Represented by the segment start and end points in an array of length two.
Example: [{ x: 0, y: 0, z: 0 }, { x: 1, y: 2, z: 3 }]
Contents:
- affineplane.segment3.create
- affineplane.segment3.toVector
- affineplane.segment3.transitFrom
- affineplane.segment3.transitTo
- affineplane.segment3.validate
Source: segment3/index.js
affineplane.segment3.create(p0, p1)
Create a segment from points.
Parameters:
Returns:
- a segment3, an array.
Source: create.js
affineplane.segment3.toVector(seg)
Convert segment to a vector from the first to the second segment point.
Parameters:
- seg
- a segment3
Returns:
- a vec3
Source: toVector.js
affineplane.segment3.transitFrom(seg, source)
Represent a segment in the reference basis. In other words, transit the segment from the source basis to the reference basis.
Parameters:
- seg
- a segment3, represented in the source basis.
- source
- a plane3, the source basis, represented in the reference basis.
Returns:
- a segment3, represented in the reference basis.
Source: transitFrom.js
affineplane.segment3.transitTo(seg, target)
Represent a segment in the target basis. In other words, transit the segment from the reference basis to the target basis.
Parameters:
- seg
- a segment3, represented in the reference basis.
- target
- a plane3, the target basis, represented in the reference basis.
Returns:
- a segment3, represented in the target basis.
Source: transitTo.js
affineplane.segment3.validate(seg)
Check if the object is a valid segment3. A valid segment3 is an array of two valid point3 objects.
Parameters:
- seg
- an object
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.size2
Two-dimensional rectangular size, consisting of width and height.
Represented with an object { w, h }.
Note that size is invariant under rotation. Consider using box2 to maintain rotation and position data of a rectangular size.
Contents:
- affineplane.size2.almostEqual
- affineplane.size2.area
- affineplane.size2.atNorm
- affineplane.size2.create
- affineplane.size2.equal
- affineplane.size2.scaleBy
- affineplane.size2.transitFrom
- affineplane.size2.transitTo
- affineplane.size2.validate
Source: size2/index.js
affineplane.size2.almostEqual(s, ss[, tolerance])
Test if two sizes are equal within tolerance.
Parameters:
- s
- a size2
- ss
- a size2
- tolerance
- optional number, default is affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.size2.area(sz)
Area. If your w and h are in px, this gives you the total number of pixels.
Parameters:
- sz
- a size2
Returns:
- a number
Source: area.js
affineplane.size2.atNorm(sz, nw, nh)
Find a point on the area.
Parameters:
- sz
- a size2
- nw
- a normalized width in 0..1
- nh
- a normalized height
Returns:
- a point2
Source: atNorm.js
affineplane.size2.create(width, height)
Create a size2 object.
Parameters:
- width
- a number
- height
- a number
Returns:
- a size2
Source: create.js
affineplane.size2.equal(s, ss)
Test if two sizes are strictly equal in value. The size objects are allowed to have additional non-equal properties.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.size2.scaleBy(sz, multiplier)
Scale and preserve aspect ratio. Multiplies all dimensions uniformly.
Parameters:
- sz
- a size2
- multiplier
- a number
Returns:
- a size2
Source: scaleBy.js
affineplane.size2.transitFrom(size, source)
Transit a size from the source plane to the reference plane.
Parameters:
- size
- a size2 on the source plane.
- source
- a plane2, the source plane, represented on the reference plane.
Returns:
- a size2, represented on the reference plane.
Source: transitFrom.js
affineplane.size2.transitTo(size, target)
Transit a size2 to a target plane. In other words, represent the size in the coordinate system of the target plane.
Parameters:
- size
- a size2 on the reference plane.
- target
- a plane2, the target plane, represented on the reference plane.
Returns:
- a size2 on the target plane.
Source: transitTo.js
affineplane.size2.validate(s)
Check if the object is a valid size2. Valid size2 has properties w,h that are valid numbers.
Parameters:
- s
- an object
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.size3
Three-dimensional cuboid size, consisting of width, height, and depth.
Represented with an object { w, h, d }.
Note that sizes are invariant under rotation. Consider using box3 to track position and rotation of a rectangular size.
Contents:
- affineplane.size3.almostEqual
- affineplane.size3.atNorm
- affineplane.size3.create
- affineplane.size3.equal
- affineplane.size3.scaleBy
- affineplane.size3.transitFrom
- affineplane.size3.transitTo
- affineplane.size3.validate
- affineplane.size3.volume
Source: size3/index.js
affineplane.size3.almostEqual(s, ss[, tolerance])
Test if two sizes are equal within tolerance.
Parameters:
- s
- a size3
- ss
- a size3
- tolerance
- optional number, default is affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.size3.atNorm(sz, nw, nh, nd)
Find a point in the volume.
Parameters:
- sz
- a size3
- nw
- a normalized width in 0..1
- nh
- a normalized height
- nd
- a normalized depth
Returns:
- a point3
Source: atNorm.js
affineplane.size3.create(width, height, depth)
Create a size3 object.
Parameters:
- width
- a number
- height
- a number
- depth
- a number
Returns:
- a size3
Source: create.js
affineplane.size3.equal(s, ss)
Test if two sizes are strictly equal in value. The size objects are allowed to have additional non-equal properties.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.size3.scaleBy(sz, multiplier)
Scale and preserve aspect ratio. Multiplies all dimensions uniformly.
Parameters:
- sz
- a size3
- multiplier
- a number
Returns:
- a size3
Source: scaleBy.js
affineplane.size3.transitFrom(size, source)
Transit a size from the source basis to the reference basis.
Parameters:
- size
- a size3 on the source basis.
- source
- a plane3, the source basis, represented on the reference basis.
Returns:
- a size3, represented on the reference basis.
Source: transitFrom.js
affineplane.size3.transitTo(size, target)
Transit a size3 to a target basis. In other words, represent the size in the coordinate system of the target.
Parameters:
- size
- a size3 on the reference basis.
- target
- a plane3, the target basis, represented on the reference basis.
Returns:
- a size3 on the target basis.
Source: transitTo.js
affineplane.size3.validate(s)
Check if the object is a valid size3. Valid size3 has properties w,h,d that are valid numbers.
Parameters:
- s
- an object
Returns:
- a boolean, true if valid
Source: validate.js
affineplane.size3.volume(sz)
Volume. If your w, h, and d are in pixels, this gives you the total number of voxels.
Parameters:
- sz
- a size3
Returns:
- a number
Source: volume.js
affineplane.sphere2
Two dimensional sphere, a circle.
Represented with an object { x, y, r } for the origin and the radius.
Aliases: affineplane.circle2
Contents:
- affineplane.sphere2.UNIT
- affineplane.sphere2.ZERO
- affineplane.sphere2.almostEqual
- affineplane.sphere2.area
- affineplane.sphere2.atCenter
- affineplane.sphere2.boundingBox
- affineplane.sphere2.boundingCircle
- affineplane.sphere2.collide
- affineplane.sphere2.collisionArea
- affineplane.sphere2.copy
- affineplane.sphere2.create
- affineplane.sphere2.equal
- affineplane.sphere2.fromPoints
- affineplane.sphere2.gap
- affineplane.sphere2.hasPoint
- affineplane.sphere2.homothety
- affineplane.sphere2.offset
- affineplane.sphere2.polarOffset
- affineplane.sphere2.rotateBy
- affineplane.sphere2.scaleBy
- affineplane.sphere2.size
- affineplane.sphere2.tangentCircle
- affineplane.sphere2.tangentCircles
- affineplane.sphere2.transitFrom
- affineplane.sphere2.transitTo
- affineplane.sphere2.translate
- affineplane.sphere2.validate
Source: sphere2/index.js
affineplane.sphere2.UNIT
The unit circle, radius=1.
Source: sphere2/index.js
affineplane.sphere2.ZERO
A zero-radius circle.
Source: sphere2/index.js
affineplane.sphere2.almostEqual(c, d[, tolerance])
Test if two spheres are almost equal by the margin of tolerance.
Parameters:
- c
- a sphere2
- d
- a sphere2
- tolerance
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.sphere2.area(sp)
Get area of the sphere.
Parameters:
- a sphere2
Returns:
- a scalar2, a number
Source: area.js
affineplane.sphere2.atCenter(sp)
Get the center point of the sphere. Note that the sphere2 object itself can act as a point2 in many cases.
Parameters:
- a sphere2
Returns:
- a point2
Source: atCenter.js
affineplane.sphere2.boundingBox(sphere)
Get outer rectangular boundary of the given sphere.
Parameters:
- sphere
- a sphere2, in the reference basis.
Returns:
- a box2, in the reference basis.
Source: boundingBox.js
affineplane.sphere2.boundingCircle(circles)
Find a circle that encloses all the given circles. The result is approximate but is quaranteed to contain the optimal bounding circle.
Parameters:
- circles
- an array of circle2
Returns:
- a circle2
Source: boundingCircle.js
affineplane.sphere2.collide(c, cc)
Detect collision between two spheres.
Parameters:
Returns:
- boolean, true if the spheres collide
Source: collide.js
affineplane.sphere2.collisionArea(c, cc)
Compute collision area between two spheres.
Parameters:
Returns:
- a scalar2, number, the area.
Source: collisionArea.js
affineplane.sphere2.copy(p)
Copy a sphere object.
Parameters:
- p
- a sphere2
Returns:
- a sphere2
Source: copy.js
affineplane.sphere2.create(x, y, r)
Create a sphere2 object.
Parameters:
- x
- a number
- y
- a number
- r
- a number, the radius
Returns:
- a sphere2
Source: create.js
affineplane.sphere2.equal(s, p)
Test if two spheres are strictly equal in radius and position. See affineplane.sphere2.almostEqual for loose comparison.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.sphere2.fromPoints(p, q)
Create a sphere2 from two points, the origin p and the circumference point q.
Parameters:
Returns:
- a sphere2
Source: fromPoints.js
affineplane.sphere2.gap(c, cc)
The gap distance between the two spheres is the closest distance between their surfaces. The gap is zero or negative when the spheres collide.
Parameters:
Returns:
- a scalar1, a number, the closest distance between the sphere surfaces.
Source: gap.js
affineplane.sphere2.hasPoint(c, point)
Detect collision between a sphere and a point.
Parameters:
Returns:
- boolean, true if the point is inside the sphere or at the surface.
Source: hasPoint.js
affineplane.sphere2.homothety(sphere, origin, ratio)
Perform homothety for the sphere about a pivot. In other words, scale the sphere by the given ratio, so that the pivot point stays fixed.
Parameters:
- sphere
- a sphere2
- origin
- a point2, the transform origin, the pivot point
- ratio
- a number, the scaling ratio
Returns:
- a sphere2
Aliases: affineplane.sphere2.scaleBy
Source: homothety.js
affineplane.sphere2.offset(c, dx, dy)
Offset a sphere by scalars dx, dy. See affineplane.sphere2.translate to offset by a vector.
Parameters:
- c
- a sphere2
- dx
- a number, an offset along x-axis.
- dy
- a number, an offset along y-axis.
Returns:
- a sphere2, translated
Source: offset.js
affineplane.sphere2.polarOffset(sphere, distance, theta)
Offset a sphere by the given distance towards the direction given by the theta angles.
Parameters:
- sphere
- a sphere2
- distance
- a number, the distance from p.
- theta
- a number, the angle around z-axis, the azimuthal angle. Clockwise rotation, following the right-hand rule.
Returns:
- a sphere2
Source: polarOffset.js
affineplane.sphere2.rotateBy(sp, origin, radians)
Rotate a sphere about an origin point.
Parameters:
Returns:
- a sphere2, the rotated sphere
Source: rotateBy.js
affineplane.sphere2.scaleBy
Alias of affineplane.sphere2.homothety
affineplane.sphere2.size(sphere)
Get the rectangular size of the circle.
Parameters:
- sphere
- a sphere2 in the reference basis.
Returns:
- a size2 in the reference basis.
Source: size.js
affineplane.sphere2.tangentCircle(ca, cb, r, righthand)
Find a circle C that is left-hand tangent to the circles A and B. Use the fourth parameter to switch to right-hand tangent. Note the coordinate system: x-axis points right and y-axis points down.
If the gap between A and B is too large for C to be tangent to both then the resulting circle is tangent with A and as close to B as possible. Under the righthand flag, the preference is reversed.
Parameters:
- ca
- a sphere2 {x,y,r}, the circle A.
- cb
- a sphere2 {x,y,r}, the circle B.
- r
- a number, a dist2, the radius of the circle C.
- righthand
- a boolean, default false. Set true to find right-hand tangent circle.
Returns:
- a sphere2
{x,y,r}
See also sphere2.tangentCircles for efficient computation of both hands with just one function call.
Source: tangentCircle.js
affineplane.sphere2.tangentCircles(ca, cb, r)
Find circles of radius r that are externally tangent to the given circles A and B. Usually there are two such circles, one at the left-hand side and one at the right-hand side with respect to the vector from A to B. The function returns the two circles in this left-right order.
If the gap between A and B is too large for the circles to be tangent to both A and B then the function compromises and returns two circles: the first is tangent to A at the direction of B and the second is tangent to B at the direction of A.
If the gap between A and B just fits a circle of radius r, the function returns only one circle.
If the circles A and B are nested, the function compromises and returns only one circle that is externally tangent to the larger one so that the returned circle is still as close to the smaller one as possible.
Parameters:
- ca
- a circle {x,y,r}, the circle A.
- cb
- a circle {x,y,r}, the circle B.
- r
- a number, the radius of the circles to find.
Returns:
See also sphere2.tangentCircle if you only need either the left-hand or right-hand result.
Source: tangentCircles.js
affineplane.sphere2.transitFrom(sphere, source)
Transit a sphere2 from the source plane to the reference plane.
Parameters:
- sphere
- a sphere2 on the source plane.
- source
- a plane2, the source plane, represented on the reference plane.
Returns:
- a sphere2, represented on the reference plane.
Source: transitFrom.js
affineplane.sphere2.transitTo(sphere, target)
Transit a sphere2 to a target plane. In other words, represent the sphere in the coordinate system of the target plane.
Parameters:
- sphere
- a sphere2 on the reference plane.
- target
- a plane2, the target plane, represented on the reference plane.
Returns:
- a sphere2, represented on the target plane.
Source: transitTo.js
affineplane.sphere2.translate(c, vec)
Translate the circle by the vector. Does not affect radius. See affineplane.sphere2.offset to translate by scalars.
Parameters:
Returns:
- a sphere2
Source: translate.js
affineplane.sphere2.validate(p)
Check if the object is a valid sphere2. A valid sphere2 has x, y, r properties that are valid numbers.
Parameters:
- p
- an object
Returns:
- a boolean, true if valid sphere2
Source: validate.js
affineplane.sphere3
Three dimensional sphere.
Represented with an object { x, y, z, r } for the origin and the radius.
Contents:
- affineplane.sphere3.UNIT
- affineplane.sphere3.ZERO
- affineplane.sphere3.almostEqual
- affineplane.sphere3.area
- affineplane.sphere3.atCenter
- affineplane.sphere3.boundingBox
- affineplane.sphere3.boundingSphere
- affineplane.sphere3.collide
- affineplane.sphere3.copy
- affineplane.sphere3.create
- affineplane.sphere3.equal
- affineplane.sphere3.fromPoints
- affineplane.sphere3.gap
- affineplane.sphere3.hasPoint
- affineplane.sphere3.homothety
- affineplane.sphere3.offset
- affineplane.sphere3.polarOffset
- affineplane.sphere3.projectTo
- affineplane.sphere3.projectToPlane
- affineplane.sphere3.rotateAroundLine
- affineplane.sphere3.rotateBy
- affineplane.sphere3.scaleBy
- affineplane.sphere3.size
- affineplane.sphere3.transitFrom
- affineplane.sphere3.transitTo
- affineplane.sphere3.translate
- affineplane.sphere3.validate
- affineplane.sphere3.volume
Source: sphere3/index.js
affineplane.sphere3.UNIT
The unit sphere, radius=1.
Source: sphere3/index.js
affineplane.sphere3.ZERO
A zero-radius sphere.
Source: sphere3/index.js
affineplane.sphere3.almostEqual(c, d[, tolerance])
Test if two spheres are almost equal by the margin of tolerance.
Parameters:
- c
- a sphere3
- d
- a sphere3
- tolerance
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.sphere3.area(sp)
Get surface area of the sphere.
Parameters:
- a sphere3
Returns:
- a scalar2, a number. The area.
Source: area.js
affineplane.sphere3.atCenter(sp)
Get the center point of the sphere. Note that the sphere3 object itself can act as a point3 in many cases.
Parameters:
- sp
- a sphere3
Returns:
- a point3
Source: atCenter.js
affineplane.sphere3.boundingBox(sphere)
Get outer cuboid boundary of the given sphere.
Parameters:
- sphere
- a sphere3, in the reference basis.
Returns:
- a box3, in the reference basis.
Source: boundingBox.js
affineplane.sphere3.boundingSphere(spheres)
Find a sphere that encloses all the given spheres. The result is approximate but is quaranteed to contain the optimal bounding sphere.
Parameters:
- spheres
- an array of sphere3
Returns:
- a sphere3
Source: boundingSphere.js
affineplane.sphere3.collide(c, cc)
Detect collision between two spheres.
Parameters:
Returns:
- boolean, true if the spheres collide
Source: collide.js
affineplane.sphere3.copy(p)
Copy a sphere object.
Parameters:
- p
- a sphere3
Returns:
- a sphere3
Source: copy.js
affineplane.sphere3.create(x, y, z, r)
Create a sphere3 object.
Parameters:
- x
- a number
- y
- a number
- z
- a number
- r
- a number, the radius
Returns:
- a sphere3
Source: create.js
affineplane.sphere3.equal(c, d)
Test if two spheres are strictly equal in radius and position. See affineplane.sphere3.almostEqual for loose comparison.
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.sphere3.fromPoints(p, q)
Create a sphere3 from two points, the origin p and the circumference point q.
Parameters:
Returns:
- a sphere3
Source: fromPoints.js
affineplane.sphere3.gap(c, cc)
The gap distance between the two spheres is the closest distance between their surfaces. The gap is zero or negative when the spheres collide.
Parameters:
Returns:
- a scalar1, a number, the closest distance between the sphere surfaces.
Source: gap.js
affineplane.sphere3.hasPoint(c, point)
Detect collision between a sphere and a point.
Parameters:
Returns:
- boolean, true if the point is inside the sphere or at the surface.
Source: hasPoint.js
affineplane.sphere3.homothety(sphere, origin, ratio)
Perform homothety for the sphere about a pivot. In other words, scale the sphere by the given ratio, so that the pivot point stays fixed.
Parameters:
- sphere
- a sphere3
- origin
- a point3, the transform origin, the pivot point
- ratio
- a number, the scaling ratio
Returns:
- a sphere3
Aliases: affineplane.sphere3.scaleBy
Source: homothety.js
affineplane.sphere3.offset(c, dx, dy[, dz])
Offset a sphere by scalars dx, dy, dz. See affineplane.sphere3.translate to offset by a vector.
Parameters:
- c
- a sphere3
- dx
- a number, an offset along x-axis.
- dy
- a number, an offset along y-axis.
- dz
- optional number. The offset along z-axis, default is 0.
Returns:
- a sphere3, translated
Source: offset.js
affineplane.sphere3.polarOffset(sphere, distance, theta[, phi])
Offset a sphere by the given distance towards the direction given by the spherical theta and phi angles.
Parameters:
- sphere
- a sphere3
- distance
- a number, the distance from p.
- theta
- a number, the angle around z-axis, the azimuthal angle. Clockwise rotation, following the right-hand rule.
- phi
- optional number, default π/2. The polar angle in radians measured from the positive z-axis.
Returns:
- a sphere3
Source: polarOffset.js
affineplane.sphere3.projectTo
Alias of affineplane.sphere3.projectToPlane
affineplane.sphere3.projectToPlane(sphere, plane[, camera])
Project a 3D sphere onto a plane in 3D space. The result is a 2D sphere. If the camera is undefined, project orthogonally.
Parameters:
- sphere
- a sphere3 in the reference space.
- plane
- a plane3 in the reference space. The target plane.
- camera
- optional point3 in the reference space. The camera position.
Returns:
- a sphere2 on the target plane.
Aliases: affineplane.sphere3.projectTo
Source: projectToPlane.js
affineplane.sphere3.rotateAroundLine(sp, line, rads)
Rotate a sphere around the axis line by the given radians.
Parameters:
Returns:
- a sphere3, the rotated sphere
Source: rotateAroundLine.js
affineplane.sphere3.rotateBy(sp, origin, radians)
Rotate a sphere about a line parallel to z-axis that goes through the origin point. The rotation direction follows the right hand rule about the positive z-axis.
Parameters:
- sp
- a sphere3
- origin
- a point3, the point that defines the line around which to rotate
- radians
- a number, angle in radians
Returns:
- a sphere3, the rotated sphere
Source: rotateBy.js
affineplane.sphere3.scaleBy
Alias of affineplane.sphere3.homothety
affineplane.sphere3.size(sphere)
Get the cuboid size of the sphere.
Parameters:
- sphere
- a sphere3 in the reference basis.
Returns:
- a size3 in the reference basis.
Source: size.js
affineplane.sphere3.transitFrom(sphere, source)
Transit a sphere3 from the source plane to the reference plane.
Parameters:
- sphere
- a sphere3 on the source plane.
- source
- a plane3, the source plane, represented on the reference plane.
Returns:
- a sphere3, represented on the reference plane.
Source: transitFrom.js
affineplane.sphere3.transitTo(sphere, target)
Transit a sphere3 to a target plane. In other words, represent the sphere in the coordinate system of the target plane.
Parameters:
- sphere
- a sphere3 on the reference plane.
- target
- a plane3, the target plane, represented on the reference plane.
Returns:
- a sphere3, represented on the target plane.
Source: transitTo.js
affineplane.sphere3.translate(c, vec)
Translate the sphere by the vector. Does not affect radius. See affineplane.sphere3.offset to translate by scalars.
Parameters:
Returns:
- a sphere3
Source: translate.js
affineplane.sphere3.validate(p)
Check if the object is a valid sphere3. A valid sphere3 has x, y, z, r properties that are valid numbers.
Parameters:
- p
- an object
Returns:
- a boolean, true if valid sphere3
Source: validate.js
affineplane.sphere3.volume(sp)
Get volume of the sphere.
Parameters:
- a sphere3
Returns:
- a scalar3, a number. The volume.
Source: volume.js
affineplane.vec2
Vector is a two dimensional dynamic movent between points, also known as a displacement vector. See affineplane.point2 for position vectors.
Contents:
- affineplane.vec2.ZERO
- affineplane.vec2.add
- affineplane.vec2.almostEqual
- affineplane.vec2.angleBetween
- affineplane.vec2.average
- affineplane.vec2.copy
- affineplane.vec2.create
- affineplane.vec2.cross
- affineplane.vec2.difference
- affineplane.vec2.divide
- affineplane.vec2.dot
- affineplane.vec2.equal
- affineplane.vec2.fromArray
- affineplane.vec2.fromPolar
- affineplane.vec2.independent
- affineplane.vec2.invert
- affineplane.vec2.magnitude
- affineplane.vec2.max
- affineplane.vec2.mean
- affineplane.vec2.min
- affineplane.vec2.negate
- affineplane.vec2.norm
- affineplane.vec2.normalize
- affineplane.vec2.projectTo
- affineplane.vec2.projectToPlane
- affineplane.vec2.projectToVector
- affineplane.vec2.rotateBy
- affineplane.vec2.rotateTo
- affineplane.vec2.scaleBy
- affineplane.vec2.scaleTo
- affineplane.vec2.sum
- affineplane.vec2.toArray
- affineplane.vec2.toPolar
- affineplane.vec2.transformBy
- affineplane.vec2.transitFrom
- affineplane.vec2.transitTo
- affineplane.vec2.unit
- affineplane.vec2.validate
Source: vec2/index.js
affineplane.vec2.ZERO
The zero vector in 2D
Source: vec2/index.js
affineplane.vec2.add(v, w)
Add two vectors. See vector.sum to add many vectors.
Parameters:
Returns:
- a vec2
Source: add.js
affineplane.vec2.almostEqual(v, w[, epsilon])
Test if two vectors v and w are almost equal by the margin of epsilon.
Parameters:
- v
- a vec2
- w
- a vec2
- epsilon
- optional number, default to affineplane.epsilon. Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.vec2.angleBetween(v, w)
Measure the smallest angle between vector v and w. Always positive. Computes the arccosine of the dot product, divided by the geometric mean of the magnitudes.
Parameters:
Returns:
- a number in range [0, π], the angle in radians.
Source: angleBetween.js
affineplane.vec2.average(vs)
Arithmetic mean of an array of vectors.
Parameters:
- vs
- an array of vec2
Returns:
- a vec2
Aliases: affineplane.vec2.mean
Source: average.js
affineplane.vec2.copy(v)
Copy vector object.
Parameters:
- v
- a vec2
Returns:
- a vec2
Source: copy.js
affineplane.vec2.create(x, y)
Create a vector object { x, y }.
Parameters:
- x
- a number. The translation along x-axis
- y
- a number. The translation along y-axis
Returns:
- a vec2
Source: create.js
affineplane.vec2.cross(v, w)
The magnitude of cross product of two 2D vectors. While in 3D, the cross product returns a perpendicular vector, in 2D we must settle for a scalar result, the length of that 3D vector.
Parameters:
Returns:
- a number
Source: cross.js
affineplane.vec2.difference(v, w)
A vector between v and w, in other words, v - w.
Parameters:
Returns:
- a vec2
Source: difference.js
affineplane.vec2.divide(vec, divisor)
The division of a vector. Equivalent to multiplying the vector by the inverse of the divisor. The direction of the vector does not change.
Parameters:
- vec
- a vec2
- divisor
- a number
Returns:
- a vec2
Throws:
- if zero divisor
Source: divide.js
affineplane.vec2.dot(v, w)
The dot product of two vectors, also called the scalar product.
Parameters:
Returns:
- a number
Source: dot.js
affineplane.vec2.equal(v, w)
Test if vectors v,w are equal
Parameters:
Returns:
- a boolean
Source: equal.js
affineplane.vec2.fromArray(arrp)
Create { x, y } vector from array [x, y].
Parameters:
- arrp
- an array
Returns:
- a vec2
Source: fromArray.js
affineplane.vec2.fromPolar(radius, direction)
Create a vector from polar coordinates.
Parameters:
- radius
- a number, radial length from the origin
- direction
- a number, angle in radians
Returns:
- a vec2
Source: fromPolar.js
affineplane.vec2.independent(v, w)
Test if the two vectors are linearly independent or almost so within the margin of affineplane.epsilon.
Parameters:
Returns:
- a boolean, true if vectors are independent.
Source: independent.js
affineplane.vec2.invert(v)
Negate the vector. For example inverse({ x: 1, y: -1 }) returns
{ x: -1, y: 1 }.
Parameters:
- v
- a vec2
Returns:
- a vec2
Aliases: affineplane.vec2.negate
Source: invert.js
affineplane.vec2.magnitude(v)
The length of the vector.
Parameters:
- v
- a vec2
Returns:
- a number
Aliases: affineplane.vec2.norm
Source: magnitude.js
affineplane.vec2.max(v, w)
Element-wise maximum of two vectors.
Parameters:
Returns:
- a vec2
Source: max.js
affineplane.vec2.mean(vs)
Alias of affineplane.vec2.average
affineplane.vec2.min(v, w)
Element-wise minimum of two vectors
Parameters:
Returns:
- a vec2
Source: min.js
affineplane.vec2.negate
Alias of affineplane.vec2.invert
affineplane.vec2.norm
Alias of affineplane.vec2.magnitude
affineplane.vec2.normalize
Alias of affineplane.vec2.unit
affineplane.vec2.projectTo
Alias of affineplane.vec2.projectToPlane
affineplane.vec2.projectToPlane(v, plane[, camera])
Project a vector onto another plane. If camera is given, project perspectively. Otherwise, project orthogonally.
Parameters:
- v
- a vec2 in the reference space, z=0.
- plane
- a plane3 in the reference space. The projection plane.
- camera
- optional point3 in the reference space.
Returns:
- a vec2 on the projection plane.
Aliases: affineplane.vec2.projectTo
Source: projectToPlane.js
affineplane.vec2.projectToVector(v, w)
Project a vector onto the line specified by another vector. In other words, get the component of a vector that is parallel with another vector.
Parameters:
Returns:
- a vec2, parallel with w.
Source: projectToVector.js
affineplane.vec2.rotateBy(v, radians)
Rotate vector by the given angle.
Parameters:
- v
- a vec2
- radians
- a number, from positive x-axis towards positive y-axis
Returns:
- a vec2
Source: rotateBy.js
affineplane.vec2.rotateTo(v, radians)
Rotate vector so that it points to the given angle.
Parameters:
- v
- a vec2
- radians
- a number from positive x-axis towards positive y-axis
Returns:
- a vec2
Source: rotateTo.js
affineplane.vec2.scaleBy(vec, multiplier)
The scalar multiplication of a vector. Scale the vector by a multiplier. The direction of the vector does not change.
Parameters:
- vec
- a vec2
- multiplier
- a number
Returns:
- a vec2
Source: scaleBy.js
affineplane.vec2.scaleTo(vec, magnitude)
Scale the vector to a certain length. The direction of the vector does not change. As an exception, zero vector length remains zero.
Parameters:
- vec
- a vec2, non-zero vector.
- magnitude
- a number, the target vector length.
Returns:
- a vec2
Source: scaleTo.js
affineplane.vec2.sum(vs)
Add an array of vectors together. See affineplane.vec2.add to add two vectors together.
Parameters:
- vs
- an array of vec2. The array can be empty.
Returns:
- a vec2
Source: sum.js
affineplane.vec2.toArray(v)
Get the vector object as an array.
Parameters:
- v
- a vec2
Returns:
- an array
[x, y]
Source: toArray.js
affineplane.vec2.toPolar(v)
Get polar coordinates of a vector.
Parameters:
- v
- a vec2
Returns:
- an object with properties:
- radius
- a number, the radial distance, the distance from z-axis.
- magnitude
- alias for radius. Will be removed in affineplane v3.
- direction
- a number, the azimuth angle in radians.
- radius
Source: toPolar.js
affineplane.vec2.transformBy(vec, tr)
Transform a vector. Translation does not affect the vector.
Parameters:
Returns:
- a vec2, the transformed vector
Source: transformBy.js
affineplane.vec2.transitFrom(vec, plane)
Transit a vec2 from the source plane to the reference plane. Translation of the plane does not affect the vector only scaling and rotation do.
Parameters:
- vec
- a vec2 on the source plane.
- plane
- a plane2, the source plane, represented on the reference plane.
Returns:
- a vec2, represented on the target plane.
Source: transitFrom.js
affineplane.vec2.transitTo(vec, plane)
Transit a vec2 to a target plane. In other words, represent the vec2 in the coordinate system of the plane. Translation of the plane does not affect the vector.
Parameters:
- vec
- a vec2 on the reference plane.
- plane
- a plane2, the target plane, represented on the reference plane.
Returns:
- a vec2, represented on the target plane.
Source: transitTo.js
affineplane.vec3
Three-dimensional vector, representing 3D movement of geometry. Vectors have no position in space, only direction and magnitude, and therefore their coordinates are affected only by plane scale and rotation when represented on different plane.
Contents:
- affineplane.vec3.ZERO
- affineplane.vec3.add
- affineplane.vec3.almostEqual
- affineplane.vec3.angleBetween
- affineplane.vec3.average
- affineplane.vec3.copy
- affineplane.vec3.create
- affineplane.vec3.cross
- affineplane.vec3.diff
- affineplane.vec3.difference
- affineplane.vec3.divide
- affineplane.vec3.dot
- affineplane.vec3.equal
- affineplane.vec3.fromArray
- affineplane.vec3.fromPolar
- affineplane.vec3.fromSpherical
- affineplane.vec3.independent
- affineplane.vec3.invert
- affineplane.vec3.magnitude
- affineplane.vec3.negate
- affineplane.vec3.norm
- affineplane.vec3.normalize
- affineplane.vec3.projectTo
- affineplane.vec3.projectToPlane
- affineplane.vec3.projectToVector
- affineplane.vec3.rotateAroundAxis
- affineplane.vec3.rotateBy
- affineplane.vec3.rotateTo
- affineplane.vec3.scaleBy
- affineplane.vec3.scaleTo
- affineplane.vec3.subtract
- affineplane.vec3.sum
- affineplane.vec3.toArray
- affineplane.vec3.toPolar
- affineplane.vec3.toSpherical
- affineplane.vec3.transformBy
- affineplane.vec3.transitFrom
- affineplane.vec3.transitTo
- affineplane.vec3.unit
- affineplane.vec3.validate
Source: vec3/index.js
affineplane.vec3.ZERO
The zero vector in 3D
Source: vec3/index.js
affineplane.vec4.ZERO
The zero vector in 4D
Source: vec4/index.js
affineplane.vec2.unit(v)
Get unit vector parallel to the given vector. The magnitude of unit vector is equal to one. If zero vector is given, assume direction towards positive x.
Parameters:
- v
- a vec2
Returns:
- a vec2, magnitude of one.
Aliases: affineplane.vec2.normalize
Source: unit.js
affineplane.vec2.validate(v)
Check if object is a valid vec2.
Parameters:
- v
- an object
Returns:
- a boolean
Source: validate.js
affineplane.vec3.add(v, w)
Parameters:
Returns:
- a vec3
Source: add.js
affineplane.vec3.almostEqual(v, w[, epsilon])
Test if vectors are almost equal by the margin of epsilon.
Parameters:
- v
- a vec3
- w
- a vec3
- epsilon
- Optional number, default to affineplane.epsilon.
- Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.vec3.angleBetween(v, w)
Measure the smallest angle between vector v and w. Always positive. Computes the arccosine of the dot product, divided by the geometric mean of the magnitudes.
Parameters:
Returns:
- a number in range [0, π], the angle in radians.
Source: angleBetween.js
affineplane.vec3.average(vs)
Arithmetic mean of an array of vectors.
Parameters:
- vs
- array of vec3
Returns:
- a vec3
Source: average.js
affineplane.vec3.copy(v)
Clone the vector object.
Parameters:
- v
- a vec3
Returns:
- a vec3
Source: copy.js
affineplane.vec3.create(x, y, z)
Parameters:
- x
- a number
- y
- a number
- z
- a number
Returns:
- a vec3
Source: create.js
affineplane.vec3.cross(v, w)
The cross product of two 3D vectors. Returns a vector perpendicular to the given vectors. In other words, the result will be normal to the plane span by the given vectors.
Parameters:
Returns:
- a vec3
Source: cross.js
affineplane.vec3.diff(v, w)
Alias of affineplane.vec3.difference
affineplane.vec3.difference(v, w)
Get the vector v - w. In other words, if we place v, w to begin from the same point then the result is a vector from the end of w to the end of v.
Parameters:
Returns:
- a vec3
Aliases: affineplane.vec3.diff, affineplane.vec3.subtract
Source: difference.js
affineplane.vec3.divide(vec, divisor)
The division of a vector. Equivalent to multiplying the vector by the inverse of the divisor. The direction of the vector does not change.
Parameters:
- vec
- a vec3
- divisor
- a number. If zero, will result a vector having infinite length.
Returns:
- a vec3
Source: divide.js
affineplane.vec3.dot(v, w)
Dot product of two vectors, also called the scalar product.
Parameters:
Returns:
- a number
Source: dot.js
affineplane.vec3.equal(v, w)
Test if vectors v, w are equal in value.
Parameters:
Returns:
- a boolean, true if equal
Source: equal.js
affineplane.vec3.fromArray(arrv)
Create a vec3 from an array [x, y, z].
Parameters:
- arrv
- an array
Returns:
- a vec3
Throws:
- if arrv has less than three elements.
Source: fromArray.js
affineplane.vec3.fromPolar(radius, direction, depth)
Create a vector from cylindrical polar coordinates. See also affineplane.vec3.toPolar.
Parameters:
- radius
- a number, the radial distance from z-axis.
- direction
- a number, the azimuth angle in radians.
- depth
- optional number, default 0. The z coordinate.
Returns:
- a vec3
Source: fromPolar.js
affineplane.vec3.fromSpherical(magnitude, roll, pitch)
Create a vector from spherical polar coordinates. See also affineplane.vec3.toSpherical.
Parameters:
- magnitude
- a number, the length of the vector.
- roll
- a number, the roll angle in radians.
- pitch
- optional number, default 0. The pitch angle in radians.
Returns:
- a vec3
Source: fromSpherical.js
affineplane.vec3.independent(v, w)
Test if the two vectors are linearly independent or almost so within the margin of affineplane.epsilon.
Parameters:
Returns:
- a boolean, true if vectors are independent.
Source: independent.js
affineplane.vec3.invert(v)
Get the vector -v.
Parameters:
- v
- a vec3
Returns:
- a vec3
Aliases: affineplane.vec3.negate
Source: invert.js
affineplane.vec3.magnitude(v)
The euclidean length of the vector.
Parameters:
- v
- a vec3
Returns:
- a number
Aliases: affineplane.vec3.norm
Source: magnitude.js
affineplane.vec3.negate
Alias of affineplane.vec3.invert
affineplane.vec3.norm
Alias of affineplane.vec3.magnitude
affineplane.vec3.normalize
Alias of affineplane.vec3.unit
affineplane.vec3.projectTo
Alias of affineplane.vec3.projectToPlane
affineplane.vec3.projectToPlane(vec, plane[, position, camera])
Project a 3D vector onto a 2D plane orthogonally. If a vector position and a camera positions are given, project the vector perspectively. Think of the vector as a displacement that acts at the given position. The resulting 2D vector is the component of that displacement parallel with the plane which would produce visually same movement.
Parameters:
- vec
- a vec3, in the reference basis.
- plane
- a plane3, in the reference basis. The image plane to which to project.
- position
- optional point3, the vector position in the reference basis. The vector itself has only direction and magnitude, no position, and the perspective projection requires a position. If left undefined, will project orthogonally.
- camera
- optional point3, the camera position in the reference basis. If left undefined, will project orthogonally.
Returns:
- a vec2 on the image plane.
Aliases: affineplane.vec3.projectTo
Source: projectToPlane.js
affineplane.vec3.projectToVector(v, w)
Project a vector onto the line specified by another vector. In other words, get the component of a vector that is parallel with another vector.
Parameters:
Returns:
- a vec3, parallel with w.
Source: projectToVector.js
affineplane.vec3.rotateAroundAxis(v, axis, angle)
Rotate a vector by the given radian angle around the specified axis vector. The method uses Rodriques’ rotation formula under the hood. If you need to rotate multiple vectors simultaneously, it is probably better to construct a rotation matrix first and apply it to each vector.
Parameters:
- v
- a vec3
- axis
- a vec3, must not be a zero vector
- angle
- a number, an angle in radians. Rotation around the axis. Rotation direction follows the right-hand rule.
Returns:
- a vec3
Source: rotateAroundAxis.js
affineplane.vec3.rotateBy(v, roll[, pitch])
Rotate vector by the given radian angles. Roll is applied before pitch.
Parameters:
- v
- a vec3
- roll
- a number, roll angle in radians. Right-hand rotation around z-axis.
- pitch
- optional number, pitch angle in radians. Default 0. Right-hand rotation around x-axis.
Returns:
- a vec3
Source: rotateBy.js
affineplane.vec3.rotateTo(v, roll[, pitch])
Rotate vector so that it points to the given radian angles. The vector magnitude is preserved. Roll is applied before pitch.
Parameters:
- v
- a vec3
- roll
- a number, roll angle in radians. Right-hand rotation around z-axis.
- pitch
- optional number, pitch angle in radians. Default 0. Right-hand rotation around x-axis.
Returns:
- a vec3
Source: rotateTo.js
affineplane.vec3.scaleBy(vec, multiplier)
The scalar multiplication of a vector. Scale the vector by a multiplier. The direction of the vector does not change.
Parameters:
- vec
- a vec3
- multiplier
- a number
Returns:
- a vec3
Source: scaleBy.js
affineplane.vec3.scaleTo(vec, magnitude)
Scale the vector to a certain length. The direction of the vector does not change. As an exception, zero vector length remains zero.
Parameters:
- vec
- a vec3, non-zero vector.
- magnitude
- a number, the target vector length
Returns:
- a vec3
Source: scaleTo.js
affineplane.vec3.subtract
Alias of affineplane.vec3.difference
affineplane.vec3.sum(vs)
Add an array of vectors together. See affineplane.vec3.add to add two vectors together.
Parameters:
- vs
- an array of vec3. The array can be empty.
Returns:
- a vec3. If the array is empty, returns the zero vector.
Source: sum.js
affineplane.vec3.toArray(v)
Convert vector to array with elements [x, y, z].
Parameters:
- v
- a vec3
Returns:
- an array
Source: toArray.js
affineplane.vec3.toPolar(v)
Get cylindrical polar coordinates of a vector.
Parameters:
- v
- a vec3
Returns:
- object with properties
- radius
- a number, the radial distance, the distance from z-axis.
- direction
- a number, the azimuth angle in radians.
- depth
- a number, the z coordinate, the axial position.
- magnitude
- alias for radius, will be removed in affineplane v3
- radius
Source: toPolar.js
affineplane.vec3.toSpherical(v)
Get spherical polar coordinates for a vector. See also affineplane.vec3.fromSpherical.
Parameters:
- v
- a vec3
Returns:
- object with properties:
- magnitude
- a number, the length of the vector.
- roll
- a number, the roll angle in radians.
- pitch
- a number, the pitch angle in radians.
- magnitude
Source: toSpherical.js
affineplane.vec3.transformBy(vec, tr)
Transform a vector. Translation does not affect the vector.
Parameters:
Returns:
- a vec3, the transformed vector
Source: transformBy.js
affineplane.vec3.transitFrom(vec, plane)
Represent the vector on the reference plane without losing information. Note that plane translation does not affect vectors.
Parameters:
Returns:
- a vec3, represented on the reference plane.
Source: transitFrom.js
affineplane.vec3.transitTo(vec, plane)
Represent the vec on the target plane without losing information.
Parameters:
Returns:
- a vec3, represented on the target plane.
Source: transitTo.js
affineplane.vec3.unit(v)
Get unit vector parallel to the given vector. The magnitude of unit vector is equal to one. If zero vector is given, assume direction towards positive x.
Parameters:
- v
- a vec3
Returns:
- a vec3, magnitude of one.
Aliases: affineplane.vec3.normalize
Source: unit.js
affineplane.vec3.validate(v)
Check if object is a valid vec3.
Parameters:
- v
- an object
Returns:
- a boolean
Source: validate.js
affineplane.vec4
A vec4 is a 4D vector { x, y, z, w }.
Contents:
- affineplane.vec4.ZERO
- affineplane.vec4.add
- affineplane.vec4.almostEqual
- affineplane.vec4.create
- affineplane.vec4.equal
- affineplane.vec4.norm
- affineplane.vec4.scaleBy
- affineplane.vec4.validate
Source: vec4/index.js
affineplane.vec4.add(v, w)
Add two vectors together via component-wise addition.
Parameters:
Returns:
- a vec4
Source: add.js
affineplane.vec4.almostEqual(v, w[, epsilon])
Test if vectors are almost equal by the margin of epsilon.
Parameters:
- v
- a vec4
- w
- a vec4
- epsilon
- Optional number, default to affineplane.epsilon.
- Set to 0 for strict comparison.
Returns:
- a boolean
Source: almostEqual.js
affineplane.vec4.create(x, y, z, w)
Parameters:
- x
- a number
- y
- a number
- z
- a number
- w
- a number
Returns:
- a vec4
Source: create.js
affineplane.vec4.equal(v, w)
Test if vectors v, w are equal in value.
Parameters:
Returns:
- a boolean, true if equal
Source: equal.js
affineplane.vec4.norm(v)
The length of 4D vector. Also called the norm.
Parameters:
- v
- a vec4
Returns:
- a number
Source: norm.js
affineplane.vec4.scaleBy(v, m)
Scalar multiplication of a vector.
Parameters:
- v
- a vec4
- m
- a number, a multiplier
Returns:
- a vec4
Source: scaleBy.js
affineplane.vec4.validate(v)
Check if object is a valid vec4.
Parameters:
- v
- an object
Returns:
- a boolean
Source: validate.js
affineplane.version
Package version string, for example '1.2.3'.
We use semantic versioning.
Source: lib/index.js